We use our own mavlink fork.
That specific message is one of the messages that differ between our own fork and the upstream mavlink repository where you are getting your documentation from.
In addition to this, I recall seeing mention of “hidden” mission commands on the recent video about creating a mission that lands, disarms, and re-arms and flies another segment of the mission. I expect those commands may be in here too - and, how to use them in Mission Planner.
I realize I’m opening a huge can of worms - unless there is documentation that explains all this that I’ve missed, it’s no small thing to get someone to explain it all. Unfortunately all this wonderful functionality is of little use one can’t figure out how to use it.
So, not in the ArduPilot docs - glad I didn’t miss it.
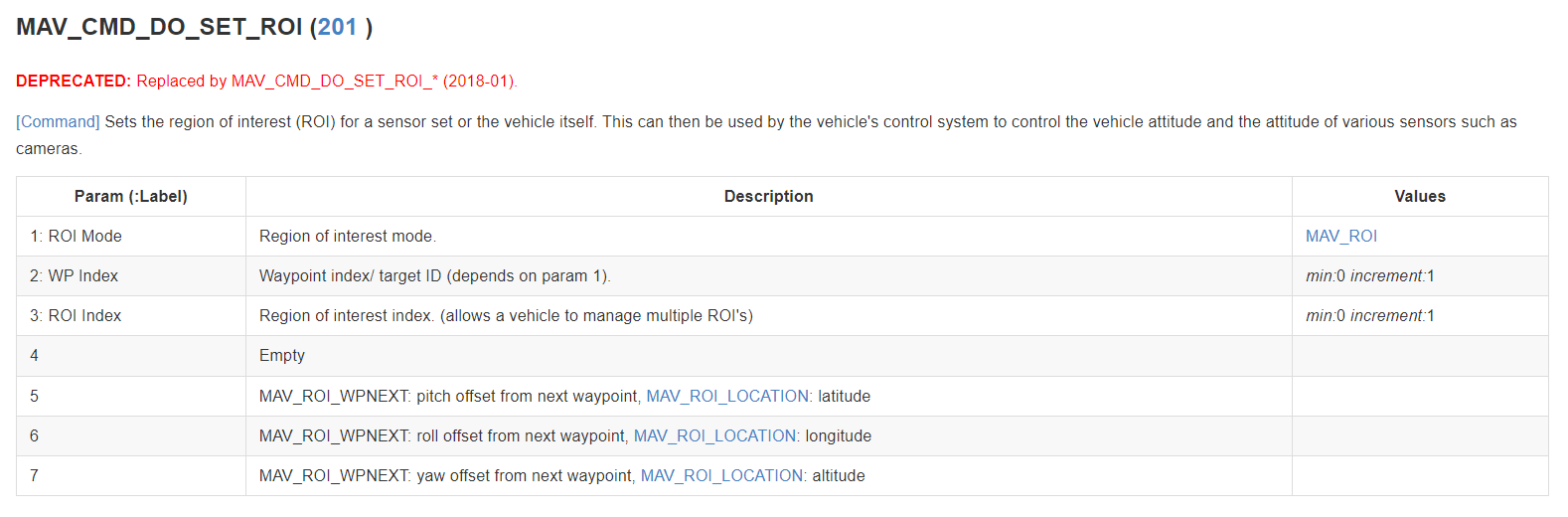
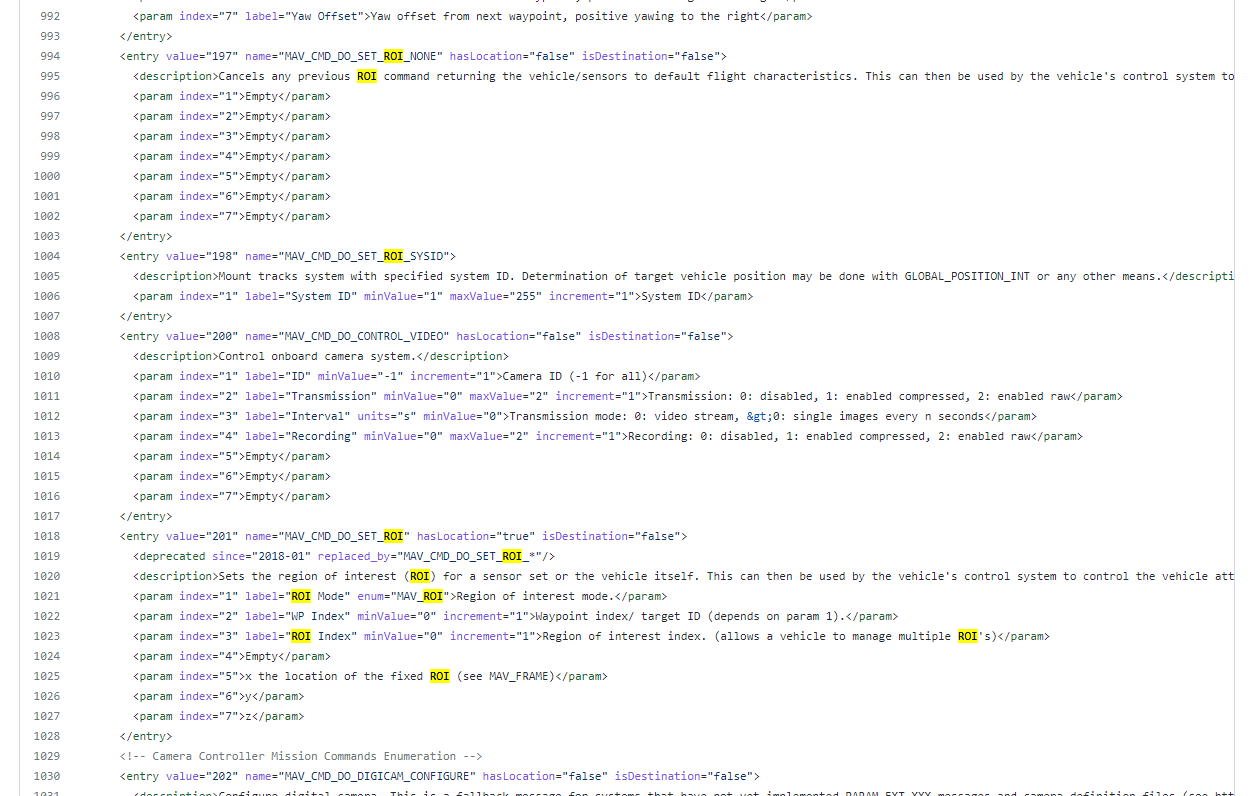
I’m still not sure this will do the trick. Command “197” is in the XML docs, but Mission Planner rejects this when attempting to upload that value by manually entering it into a waypoints file. (I tried it.)
So I’m going to need more help. For instance, for command 201, one parameter is “ROI Index”. But how does one establish an ROI Index?
And in Mission Planner, parameters 5, 6 and 7 are latitude, longitude and altitude. But the XML doc is abstract - it says “x” “y” and “z” as locations. That suggests to me that there’s more to specifying the ROI point in space.
I’m trying to understand how to use ArduPilot as a tool.
For example - on my new Alexmos gimbal, the “Point Camera Here” feature on Mission Planner doesn’t work because ArduPilot and Alexmos don’t synchronize the initial heading. The Storm32 gimbal does. I can’t tell if I’m doing something wrong - or if there’s some shortcoming on how Ardupilot talks to Alexmos over Mavlink.
Once that’s sorted out, I’m hoping to create missions that take full advantage of the Alexmos gimbal.
In the Alexmos forum, Alexmos himself states (only a year or so ago) that the serial protocol provides more functionality than Mavlink. I need to know where the limitations are.
There’s a whole host of things to understand. Why for example, is a command that’s documented in the Ardupilotmega dialect of Mavlink (resetting ROI to null) get rejected when loading a mission to the flight controller?
And - there’s the whole topic of the “extra” mission commands that can be entered using undocumented techniques - as mentioned in the video that demonstrates creating a mission that restarts after landing and dis-arming.
There seems to be a lot to know - and I’m simply trying to learn.