Hi,
we want to send a boat in strong current to a defined position and to perform loiter unlimited at this position. We failed using mavlink command MAV_CMD_NAV_LOITER_UNLIM. (Error message = 3 Command or mission item is not supported, other commands would be accepted).
Therefore we we tried it as follows:
- Set Waypoint;
- SetMode Auto + Parameter LOITER_UNLIMITED.
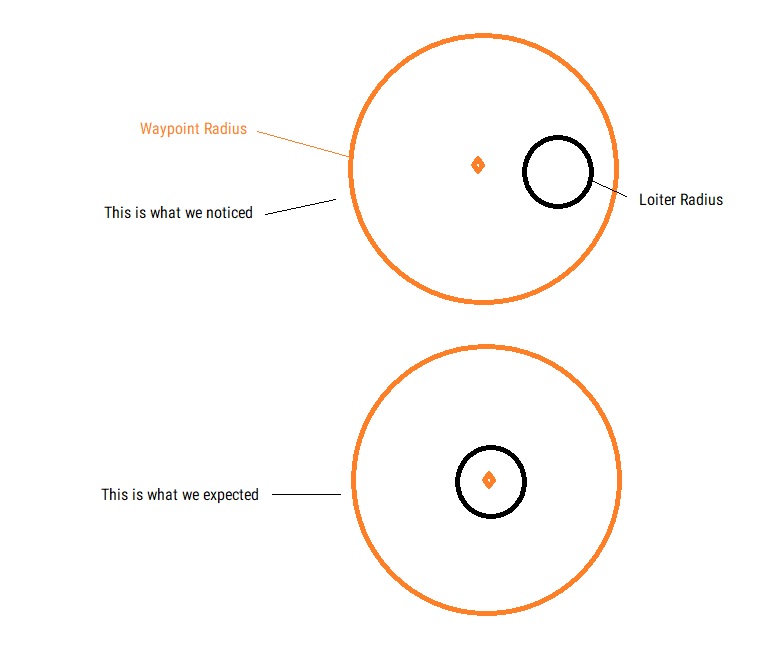
Basically it works fine, but we assume that the waypoint coordinate we have set is not the same, as the coordinate of the center of the loiter radius.
If we approach the same position upriver, compared to downstream we see a significant difference of the position where the boat is loitering. We already tried different parameters for loiter and waypoint radius but we think it could be better if the loiter unlimited function would use the waypoint coordinates.
Any advice how to improve the accuracy is highly appreciated. Thank you in advance.