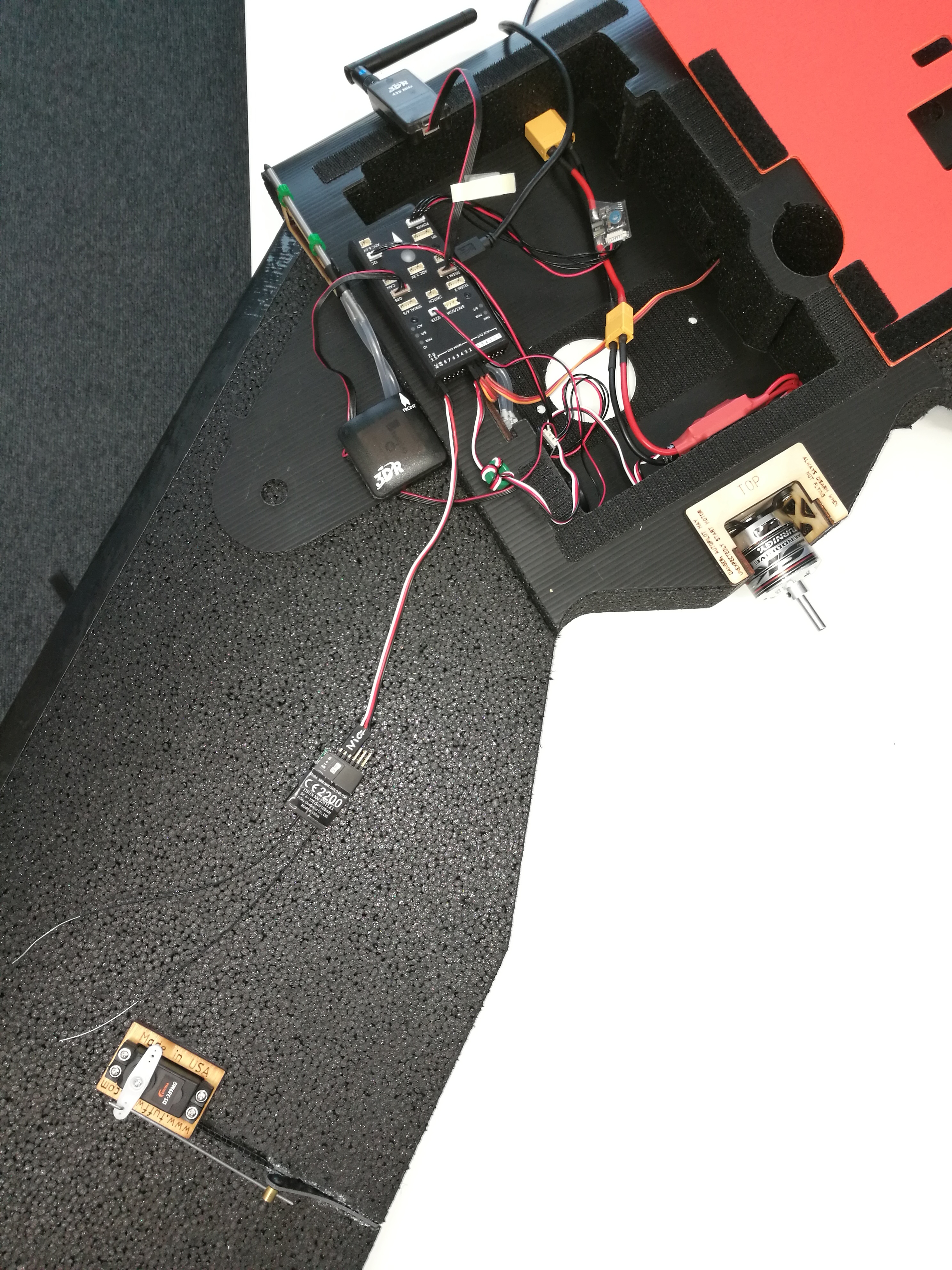
i’m using a Deltawing (Tuffwing) with a Holybro “Pixhawk” and a FrSky X4R receiver.
ArduPlane 3.7.1 with MP 1.3.48.
The servos work properly if connected to the receiver (FrSky X4R) directly.
However when connected to the Pixhawk there is no movement at all even though signal input is visible in the MissionPlanner.
Arming request is disabled to prevent all the pre-checks. Blue main LED of ixhawk is on since there’s no GPS signal inddors available.
I would like to check all servo movements coming from the transmitter (FrSky X9E) in manual Flightmode and also in higher stabilisation modes, checking if they are reacting on the planes movement.
I agree. That’s why i didn’t connect any safety switch for “dry practice” in my office.
No safety switch, all pre-checks disabled and arming request set to zero.
The FC boots normally and arms directly at the end (long beep).
So do you disable safety switch in mission planner parameters ?
If so, your ESC doesn’t send enough power to servo rail or it’s not a sbec esc but it seems to be a turnigy plush
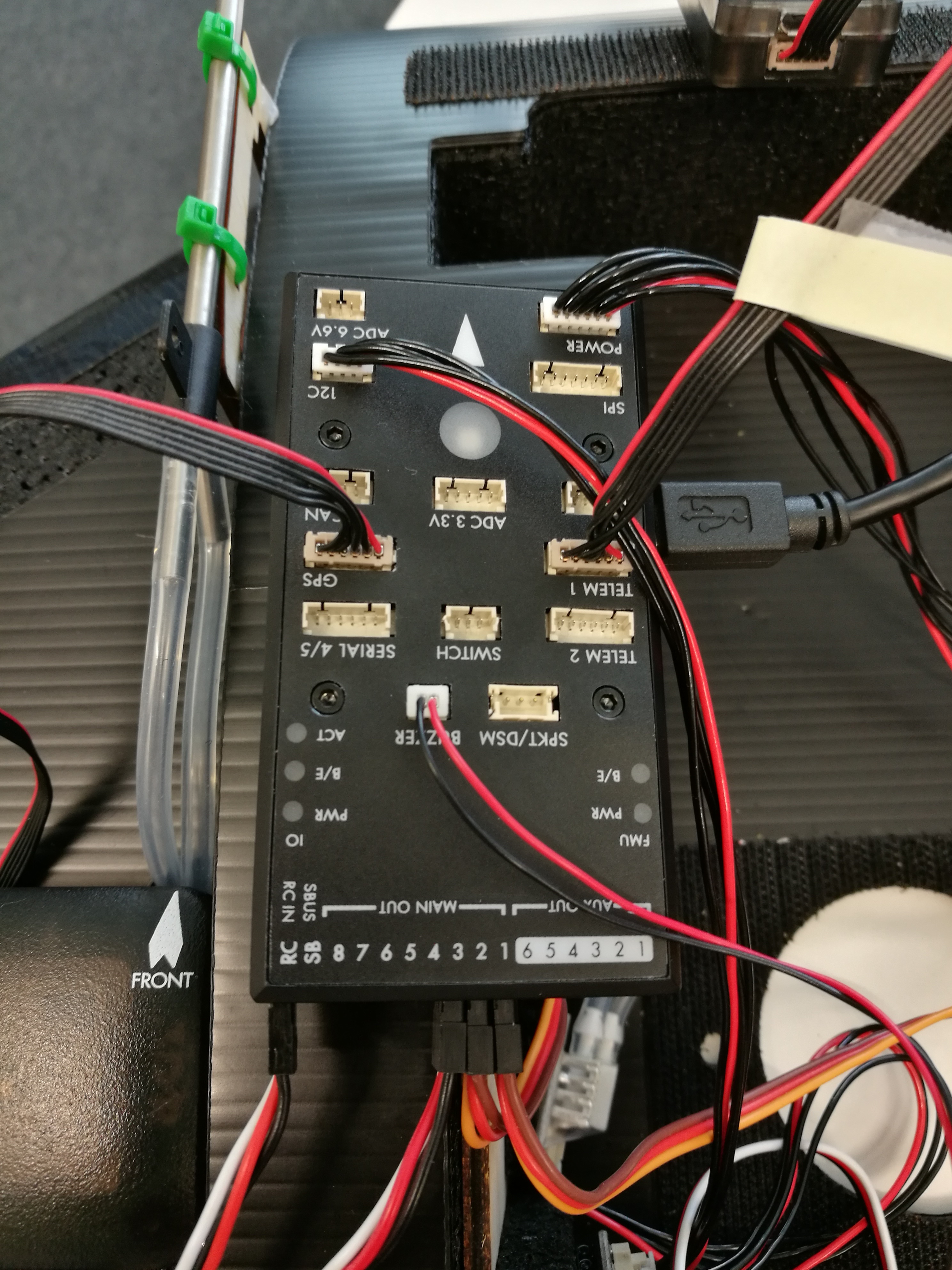
It’s a turnigy ESC which is connected via BEC to MainOut3 but i didn’t connect it to the PowerModule to be sure to prevent the motor from running up.
So i guess i didn’t power up the servo rail at all…