While I tested rover, I found two minor problems.
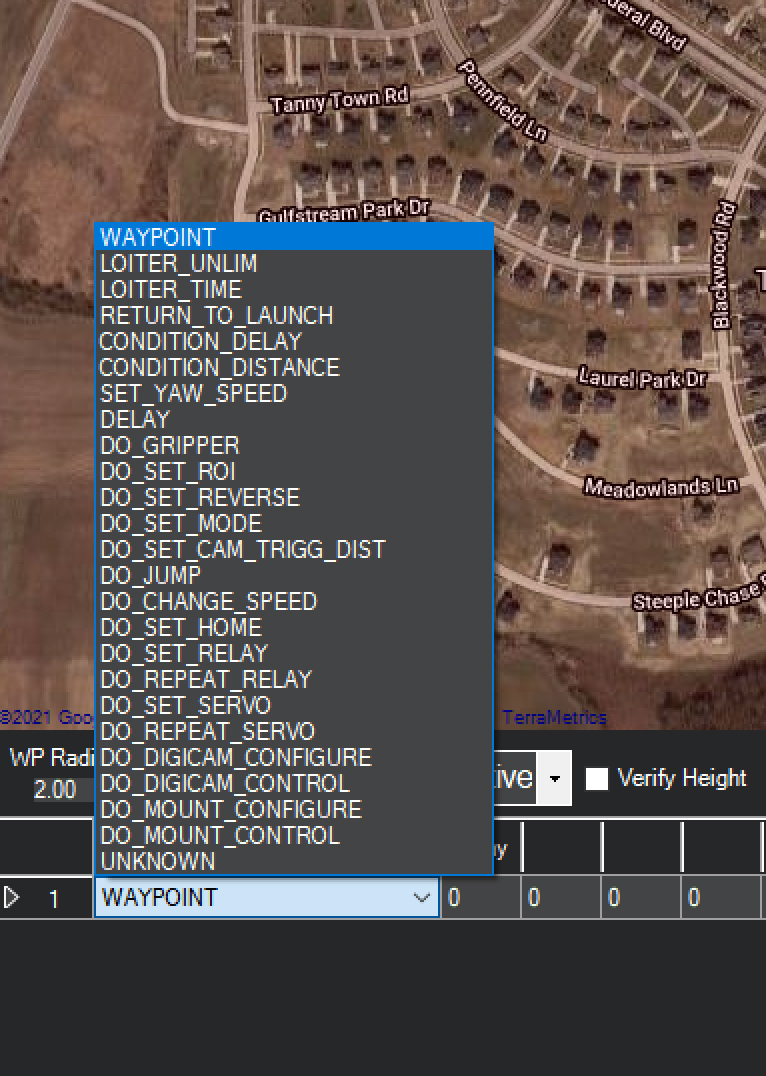
First, “Cond Delay” command does not work though I can still make the delay by using the waypoint command.
Second, if I assign -1 second to the delay at each waypoint, the delay time will be 65,535 seconds.
Well, relative to the Mavelink commands that’s a good question. As I understand it the “Condition Delay” is only to delay a subsequent Do command and a “Delay” can be used more globally. But some info is missing here.
As @KimHyungSub discovered if you use a Condition Delay command to attempt to delay flight, say after reaching a WP, it doesn’t do that. A “Delay” command, found in MP, will.
There are both CONDITION_DELAY and a NAV_DELAY commands. So in AP at least we interpret the CONDITION_DELAY as delaying just the do commands (i.e. commands that don’t affect navigation) and the NAV_DELAY command affects navigation. Basically NAV_DELAY will make the vehicle stop and wait.
I think the distinction is useful because it allows a user to specify that a “do” command should be executed 5 seconds after passing a waypoint? NAV_DELAY in turn is a much newer command (that I added actually) that also allows delaying to a specific time of day or a specific number of minutes past the hour, etc…
AP has always interpreted CONDITION_DELAY as only affecting the do commands since before I took over as maintainer of Copter/Rover. That doesn’t mean it’s correct of course and I’m open to discussing changing it if we have a good idea on what should happen.
Ok, seems a bit odd. But doesn’t matter too much to QGC since it’s the user who will have to understand the command. With respect to CONDITION_DELAY and NAV_DELAY can you tell me which vehicle types support which? And then I can update QGC to be correct.