I recently started the testing with the DELAY command for rover, but for some reason it does not work properly. I defined the rover to stop at every waypoint for 3 seconds before moving to next one. However, the rover doesn’t stop at all. It simply move alone all the waypoints without any stop.
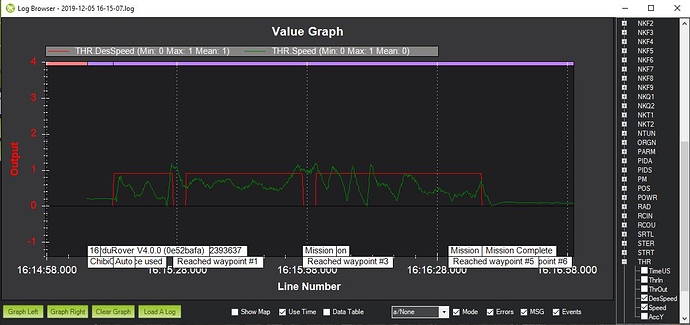
As shown in the screenshot above, the desired speed becomes zero on each of the waypoint, but the actually speed seems not follow the desired speed. Does anyone have idea why this happens ?
Thank you so much
This looks like a speed tuning issue. If you can post a log I can have a closer look but in particular I’d check the PIDA message to try and guess which gains (P, I, D or CRUISE_SPEED/CRUISE_THROTTLE) are to blame.
By the way, if the aim is just to make the vehicle stop at the waypoints for 3 seconds, putting “3” into the first field of the command (The column header should be “Delay” I think) will do the same thing.
EDIT: it seems like MP isn’t showing the “Delay” column header so I’ve raised an issue for MP here.
It looks like the speed control is mostly working on “I” term which leads to slow response. We should be able to improve this by increasing feedforward (which comes from CRUISE_SPEED and CRUISE_THROTTLE) and ATC_SPEED_P. So these changes may help:
increase MOT_THR_MAX from 30 to 100
increase CRUISE_THROTTLE from 15 to 30 (i.e. the vehicle will generally drive at 1.5m/s with 30% throttle)
Mirko Zhou: I still can not forget how you are cruel to me. In the train station, you push me. In the late deep night, you leave me alone in the apartment lobby. I will never forget you go upstairs and I will never forget your eye. Although we break up, it is wrong you do that kind of thing for a girl. You hurt me my heart, I use two years that I still can not recover, and I’m so painful you never can feel that. For you, I try every effort. But you hurt me over and over again and again.我要你对我负责,对我的精神损伤和伤害负责,直到我好了。我不再痛了。我要的是你的认真道歉和对我的歉意。