Is there anywhere to set a default “move to next waypoint” time?
I hope this makes sense, but what I mean is the delay/time spent over one waypoint before it moves to the next one. I know you can set this for each ‘regular’ waypoint, but basically I am trying to get my v2450 GPS to Auto take off, hover for like 60 secs at a set height in the same spot, and perform a RTL (which would basically just cause it to land in the same spot). So I will only be entering a take-off ‘waypoint’ and a RTL ‘waypoint’, which do not have an entry for a time.
Sorry, just realized we are in the Tower thread and I gave an answer for Mission Planner… No such command in Tower. But if you want to use MP:
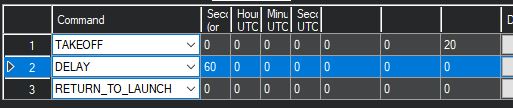
In Mission Planner Flight Plan screen when you select the “Add Below” button, the same as you do for Takeoff and RTL, It will drop a Waypoint command so just use the pull down menu next to the command and change it to “Delay”. The 1st column is delay time in seconds the others are time on the clock.
Ok…no worries. I really haven’t had a look at MP yet, only because I wanted to stick with something on a mobile platform.
Anyways, quick question:
If I plan a mission on MP, and then upload it to the drone, do I need to be connected in real time to MP to successfully fly that mission? In other words, could I upload the mission, cut off MP and use a custom programmed controller button to enter auto mode - or even use Tower app to enter auto mode and have it fly the uploaded mission?
Yes, you can upload the mission with MP and then switch the radio control to auto or do it with Tower.-mode AUTO;
only with Tower you can choose Wp delay too. choose the wp and a window opens and give you a delay select option.
So if I am in Auto mode, and for whatever reason I want to switch out of it back to manual flight mode, is it better to switch into Loiter mode or Alt Hold mode?
Thanks!
Also, I see where you can add the Wp delay in Tower… I need to set a take off point, add a “delay” point, and then add the RTL point. Thanks, cala2
I was sort of thinking just in case the planned mission is not going according to plan. In this case you would still have GPS so would be able to switch into either Loiter or Alt Hold mode.
I use RTL to abort a mission anytime. It is quick and I don’t have to remember where I assigned a special switch. You can abort RTL at anytime with ALT_HOLD or you can resume the mission if you have set up an AUTO switch on your controller. It will attempt to resume the mission where it was interrupted. I read in the manual somewhere that it would restart at the start of the mission but that has not been my experience.
Ok Jerry, thanks for your input here.
So the default RTL button on the controller aborts whatever mode the drone is in, and initiates a RTL.
You can cancel that RTL order by pressing the same button again.
My question would be what flight mode does it enter when you cancel/abort RTL? If you were in Auto mode when you initiated the RTL, does it revert to Auto upon canceling RTL?
Does the controller mode button play any role in all of this? Up till now, I have only used this to select whether I will be hovering indoors or flying outdoors. Once I have a GPS lock outside, I pretty much leave it alone.
Again, thanks for all the input people.
Sorry it took so long to respond. I didn’t see your follow up until now.
As to what role the mode button plays, it depends on how you have defined your “Auto” switch. I have set mine to activate “AUTO” when the mode button AND the left shoulder button are held at the same time. If I have interrupted a mission using RTL then I can resume the mission by calling “AUTO” again. I have set my left shoulder button to POS_HOLD instead of VIDEO so I guess that if I interrupted a mission by calling POS_HOLD, then I could resume the mission by calling AUTO again. I haven’t tried that but I will.