I have a question about default throttle value (RC 3 channel) on SITL.
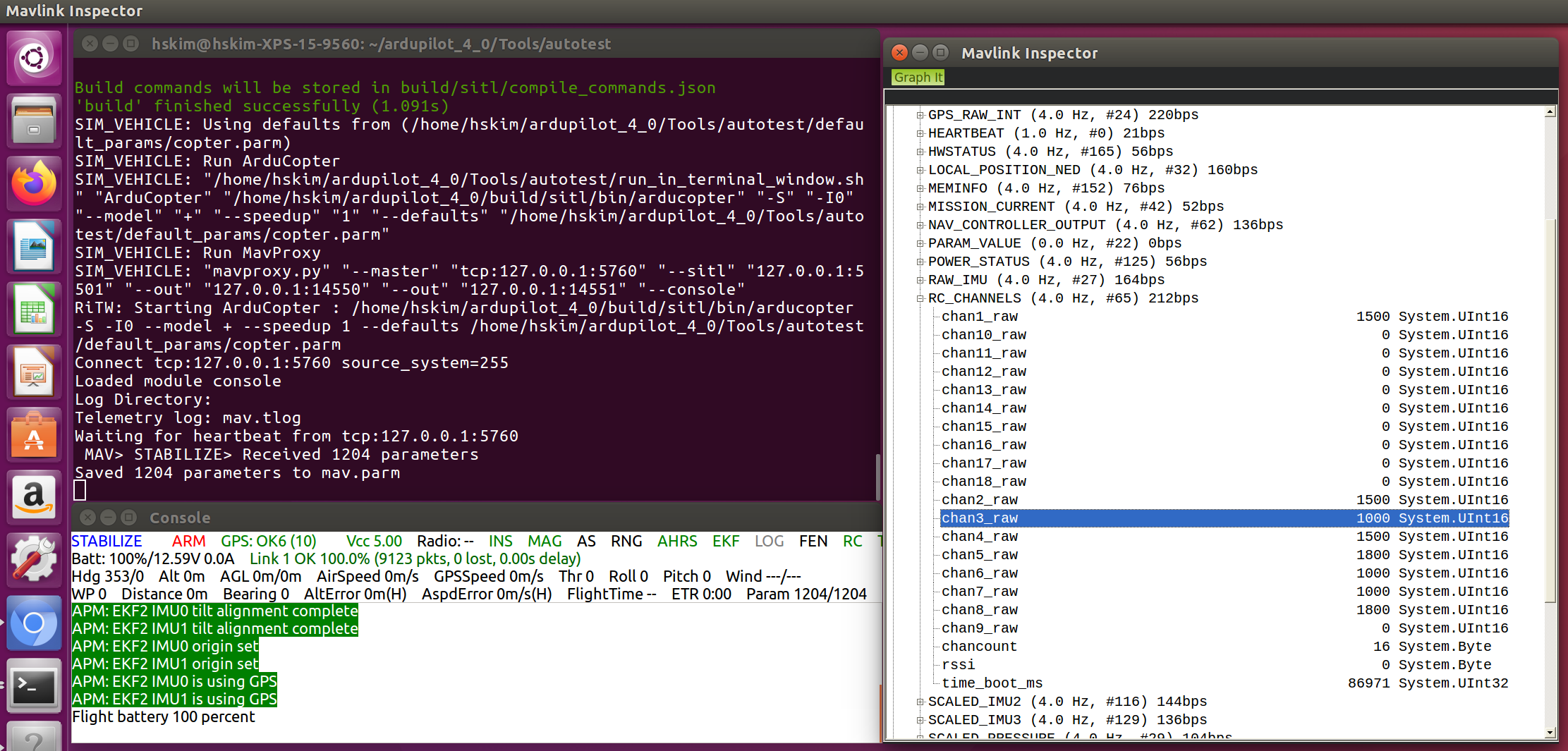
When I execute ArduCopter on SITL, it uses 1,000 as default throttle value as shown in the below.
On the other hand, other RC channels (roll, pitch, and yaw) use 1500 as default values.
Is there any specific reason to assign 1,000 to RC 3 channel? (i.e., why SITL does not assign mid-throttle value such as 1,500?)
This is because the drone loses his altitude if I am not assign a value more than 1,500 to RC 3.
Also, many guys already suffered from this issue.
Is there any problem if SITL starts to use 1,500 as the default throttle value?
Min/max throttle value
There are user parameters to limit each RC channel such as RC3_MIN and RC3_MAX.
In order to simulate disconnection of RC channel such as “rc 3 900” command, I don’t think we need to limit the minimum of the RC 3 channel. But, users still put any value to RC 3 such as 65000. It causes decreasing altitude of the drone. Can we respect the min/max parameters when users input values on RC channels?
In a real system the throttle value comes from a RC receiver. that receiver has a min and max value. When the value delivered by the receiver is outside that min, max range, the receiver is telling us that it lost connection to the RC transmitter.
SITL mimics that behavior. It’s not a bug. its a feature.
@amilcarlucas
Thank you for your answer!
In case of a real system, that’s true because there are physical limitations to control throttle, roll, pitch, and yaw sticks. Then, the min/max parameters can be decided according to a RC receiver. Am I right?
Could you share me what is specific role of the min/max RC parameters in SITL?
yes, you are right.
The specific role of the min/max RC parameters in SITL is to mimic the real system.
The point of the SITL is to be as close to the real system as possible so that you can simulate and get the same results as a real system. that way you can seamlessly interchange it with a real system.
@amilcarlucas
Thanks
I agree with you about the min/max value issue.
Could I ask a question? Do you think that the default throttle value looks still good? Do you know why default throttle is 1,000 instead of 1,500 (mid-position)?
It is uncomfortable for me because I always change the throttle value even though what I want to simulate something which just require me to keep using the mid-throttle value.
On copter the default value should be 1000 as on contrary of other channel that is the 0 value since copter don’t have reverse throttle. Default value other that 1000 will prevent you to takeoff or can trigger numerous functions