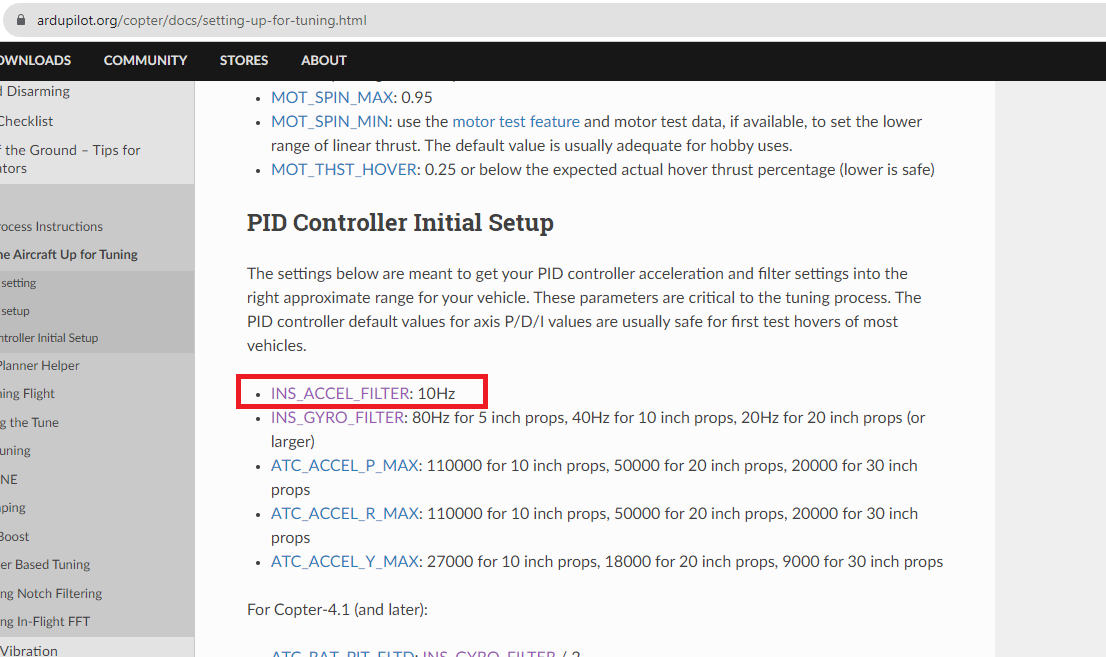
Setting up a new quad - my notes say that the default for INS_ACCEL_FILTER is 20hz, but that current thinking is to use 10hz.
The wiki Initial Tuning Guide still has INS_ACCEL_FILTER SET TO 20hz.
What’s the current thinking?
Setting up a new quad - my notes say that the default for INS_ACCEL_FILTER is 20hz, but that current thinking is to use 10hz.
The wiki Initial Tuning Guide still has INS_ACCEL_FILTER SET TO 20hz.
What’s the current thinking?
…
10Hz. Tuning guide needs an update.
Also try the newer motor thrust expo calc from in this spreadsheet - it’s not much different to the formula we’ve been using the last couple of years, so it’s perfectly safe - maybe just a little more correct and inline with real-world values. The old calculated value is shown in the copter 3.6 section for reference.
That sheet works the same as the Initial Parameters calc in mission planner - plug in you prop size and battery cell count, select the battery chemistry.
If you revisit the sheet after your test flight and put in the actual hover thrust value, it calcs a few related params for you - REF if using throttle-based HNOTCH for example. Off to one side, you can even put in your observed noise frequency and bandwidth for a closer REF value.
Yeah, a lot if the initial steps in the Tuning Guide are covered by the MP Initial Parameters calc or my spreadsheet.
FYI : Leonards guide came first, then my spreadsheet, then the MP plugin.
The spreadsheet was constructed from Leonards data and insights, and then turned into the MP Initial Params.
I’ve got a couple of updates to put forward for the MP Initial Params calculator.