I am testing out dead reckoining in SITL and it is stopping early due to EKF Failsafe. Wondering what is going on here - I can attached a log from SITL if needed.
Hi @manavgandhi17,
You’ve probably already seen it but for others, here is the Copter Deadkreckoning Failsafe wiki page.
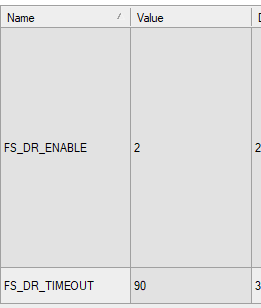
Without a log it’s hard to be sure but I suspect that the vehicle has simply reached the FS_DR_TIMEOUT limit.
Just to manage expectations, a vehicle without an absolute position source (e.g. GPS, optical flow, etc) can only estimate its position and velocity for about 30 seconds. People often ask “why can’t we fly with only IMU?” but with the level of noise in the acceleration values that we get from the IMUs in all autopilots we’ve tested, the estimates decay very quickly and they decay exponentially meaning that once it starts to go bad, it really goes bad quickly.
I suspect @manavgandhi17 knows all this but it’s such a common question that I figure it’s worth repeating it here again anyway
2 Likes
Will post the log tmmrow morning when I get to my workstation.
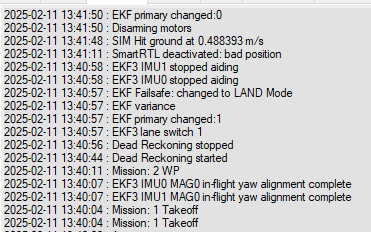
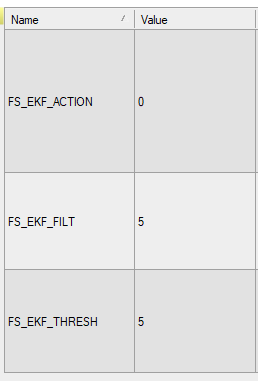
The FS_DR_TIMEOUT was set to 90 seconds (I know it will get wildly off as time grows) - but the “Dead Reckoning Stopped” message came through 12 seconds after “Dead Reckoning Started” was indicated. I believe it it is triggering some sort of EKF Failsafe causing it to go into LAND mode.
1 Like
Please see log from SITL here: 00000028.BIN - Google Drive
Let me know if there are other params/scenarios you would like me to test/log in SITL.