I tested the Dead Reckoning Failsafe project today
Flight control cuav v5+
Firmware version AC4.5.4
GPS1 septentrio dual antenna RTK GPS (type26)
GPS2 M8N gps
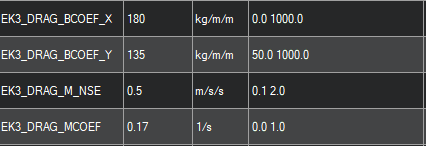
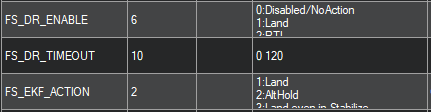
The relevant parameters are set as follows
Flight log
During the flight, I disabled GPS using the RC9 channel, and the aircraft entered the EKF failsafe after about eight seconds, and did not enter the Dead Reckoning Failsafe as expected
Hope you can help me find the reason, thank you very much
I think I found the reason
Today I tested again, I turned off the dual antenna direction finding function and changed the relevant GPS yaw parameters to the default values, and then flew three times, and I was able to measure the wind direction and wind speed after takeoff.
After disabling the GPS signal with the RC9 channel, the flight continued to be stable for about 9 seconds, then the flight mode switched to RTL, and the GCS showed that the dead reckoning was running. The aircraft returned to the current altitude and returned to the vicinity of the HOME point, and everything seemed normal.
I think the dead reckoning function didn’t work because of the settings of using GPS yaw or using GPS altitude.
Yes, you’ve bumped into a “known” issue which is that the EKF wind estimation doesn’t work while using GPS-for-yaw. This is fixed in 4.6.0-beta1 which should enter beta testing in the next day or so. Sorry for the troubles, we were unable to backport the fix to 4.5
Hello, thank you very much for your reply.
Yes, I have found this issue in my testing, and if there is a fix planned, I will test it again after 4.6.0-beta1 is released.