I have LOG_BITMASK=65535 and I have still not tried to set this value to 655358 like suggested in the wiki or in a wiki link.
When I try to use the dataflash logs to geotag images I get errors so I’ve ended using the .tlogs.
If I create .kml and .gpx files from each file I get a complete one from the .tlog but the .bin shows only the take off and first waypoint, the conversion to .log doesn’t results in any errors
I have tried to open it with FlightPlot which says Error: me.drton.jmavlib.log.FormatErrorException: Invalid header at 2842628 (0x2B6004)
What I can check?
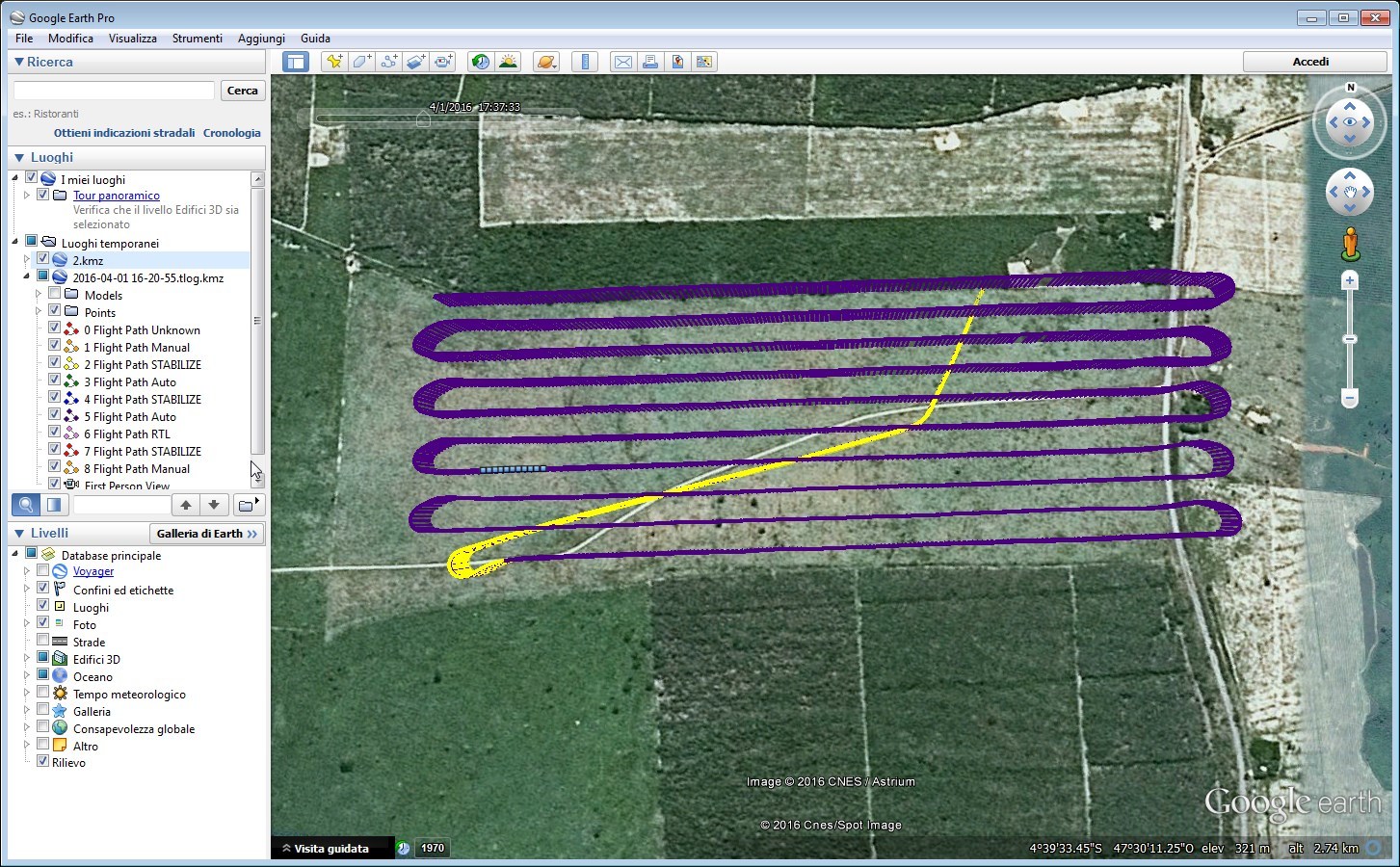
In attachments the pictures shows the complete flight from the local kmz and the yellow flight from the dataflash kmz, you can see it stops right at the camera shutter waypoint
In other pictures you can see the files size.
65538 only has log when disarmed, and log attitude_med. What suggested setting 65538? This is usually less data then you are really looking for.
What are you trying to tag with? In general you need to log a bit more for most tagging software. (65535 logs everything except when disarmed or raw data)
Sorry you are true, I was in the copter wiki, the plane wiki says 65535 but if you go to geotagging page http://ardupilot.org/plane/docs/common-geotagging-images-with-mission-planner.html?highlight=geotag in the end it points to an external page that suggest 655358 http://tuffwing.com/support/geotag_gopro_images_with_pixhawk_log.html
anyway it’s 65535 so it must work, I would like to geotag images with pitch roll and yaw position too, with the .tlog the MP geotagging tool has only added gps position at the images, am I doing it wrong?
I know Pix4D can load the log file with pitch roll and yaw position too but only if it’s the flash log, not the .tlog file.
I will try another SD Card, but this is strange, it stops right at the first CAM_TRIGGER waypoint.
I am using breakout starts to remove unwanted photos, maybe this is a not well tested feature?
Thank you
I’m not very familiar with the current state of MP’s tagging tool. Correlating roll/pitch is fairly straightforward with the CAM messages. Doing it without the cam messages is problematic because there is only a 1 second temporal resolution available from a photo’s exif information, so picking the correct values from the log can only be done to a 1 second level of accuracy, which is why the CAM approach is far superior. There are a couple of requirements for using that tagging method, to use MP’s tagging tool you must have a 1:1 correspondence between photos and CAM messages.
Alternatively there is a standalone tagging tool that I wrote that can handle a discrepancy between the number of photos and the number of CAM messages, but using it requires more effort, as there is a sync procedure that must be done before the flight to synchronize the camera and the log file, and the current published version requires you to convert .BIN’s to .log files. (Some upcoming software will improve those aspects a lot, but it will probably be at least a couple of months before it will be available).