Hi!
We are finally ready to release this telemetry board.
After months of testing and design changes we have finally arrived at a final design, integrating a very flexible and capable board to provide customization for every project.

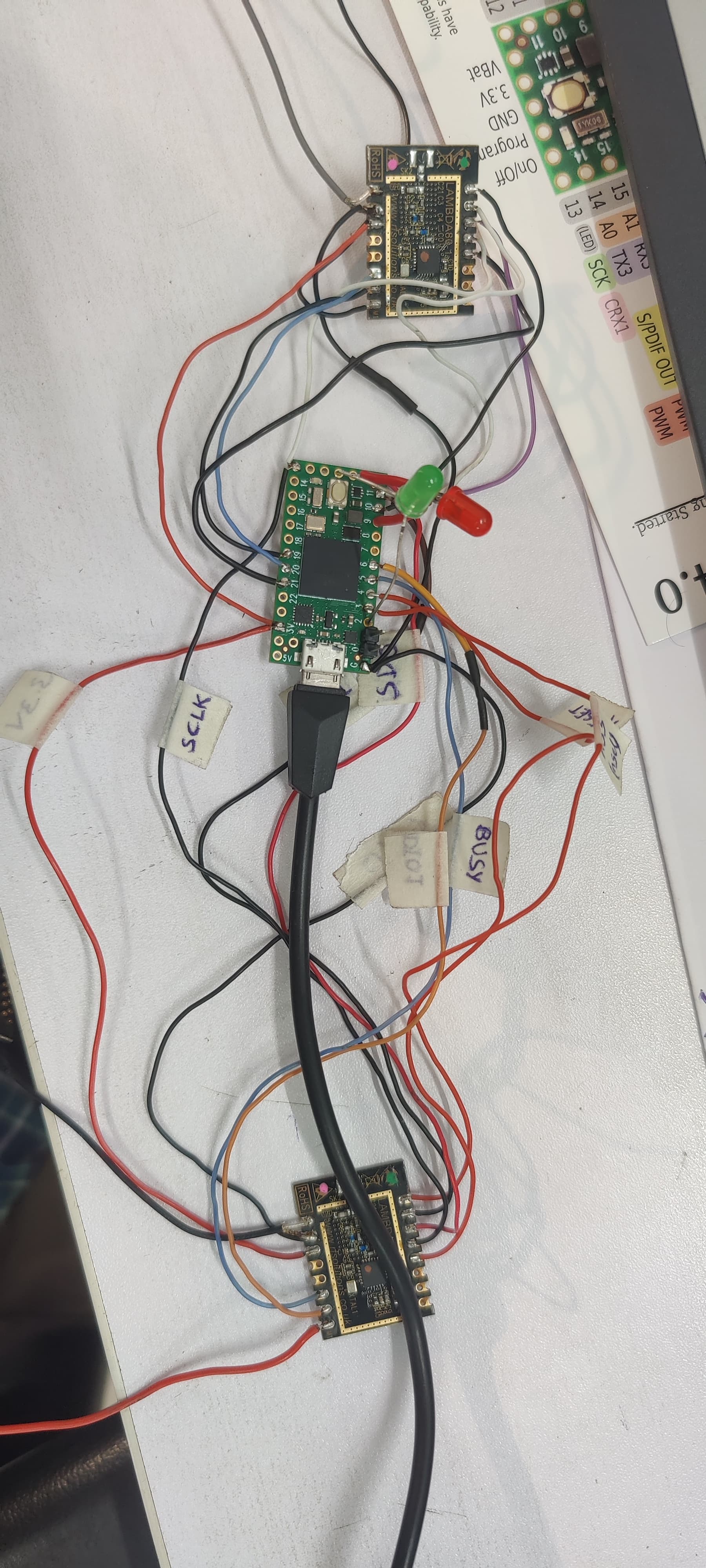
The main core is the teensy 4.0 with various exposed pins in the 4 pin jst connectors, all of them are serial capable, some have PWM and there is a CAN-BUS IC for the integration in any project.
To power the board can be provided by: a XT30 connector to accept 6-26V power, USB from the teensy, or from the jst connectors(5v). For high output power is preferable to use USB or the XT30 connector and a heat-sink)
The main feature of the board is the twin SX1280 working together to provide real full duplex communication on two different channels. The output power on TX channel is from 16 dB up to 34 dB, the other channel used for RX is capable of transmitting but is normally used for continuous reception.
The speeds are using the example FLRC modulation is 325k with 3/4crc → 240 kbps of effective data rate with a -106dB sensitivity in reception. The band can go up to 1,3Mbps, with -96 sens.
If the LORA modem is used in the maximum sensitivity options -132 db can be possible to transmit for hundreds of kilometers (theoretically).
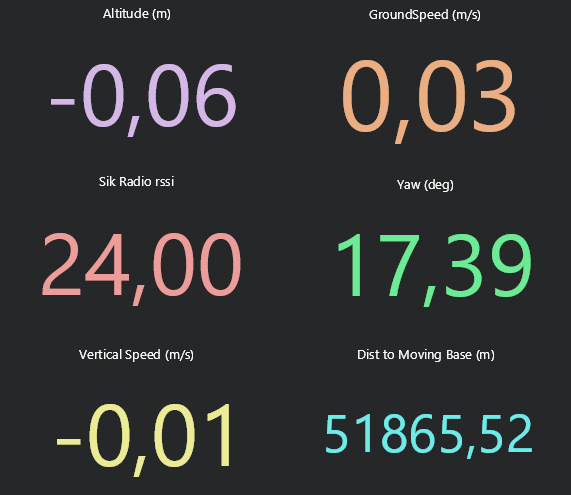
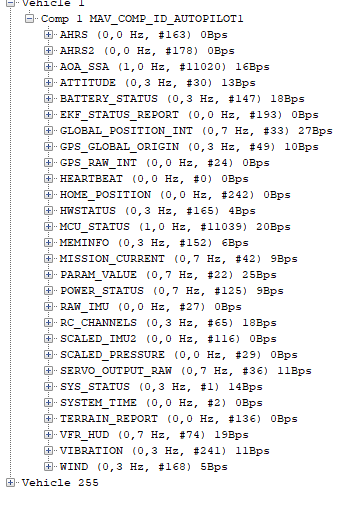
The standard program on Github provides a communication link from USB ground station and a UART on a vehicle, on the ground the telemetry is mirrored to the UART1 to link an AAT.
The testing at 30 dBi showed good results, at 1300kbps with a 2.5dBi mimo antenna on either side of the communication, we achieved a link distance of 6km, but with a 18 dBi panel antenna and a aat we easily achieved 15km with a tree line in the way and a very stable link.
For the maximum range the RX and TX antenna should be as far as possible, especially at full power ( if the antennas are close more than 30cm you can burn the reciver)
You can have a general idea of the range for your setup with this simple tool:
https://www.immersionrc.com/rf-calculators/
The staring price of the board is 150€, without teensy 4.0 and heat-sink.
We will provide a simple manual and a more refined standard program later, obviously you can modify the program to do other functions, like a normal arduino.
The program is on this git page:
https://github.com/Xarin94/DATAD-telemetry-2.4Ghz
The physical dimensions are 45x80mm and 30 gr. with the teensy.