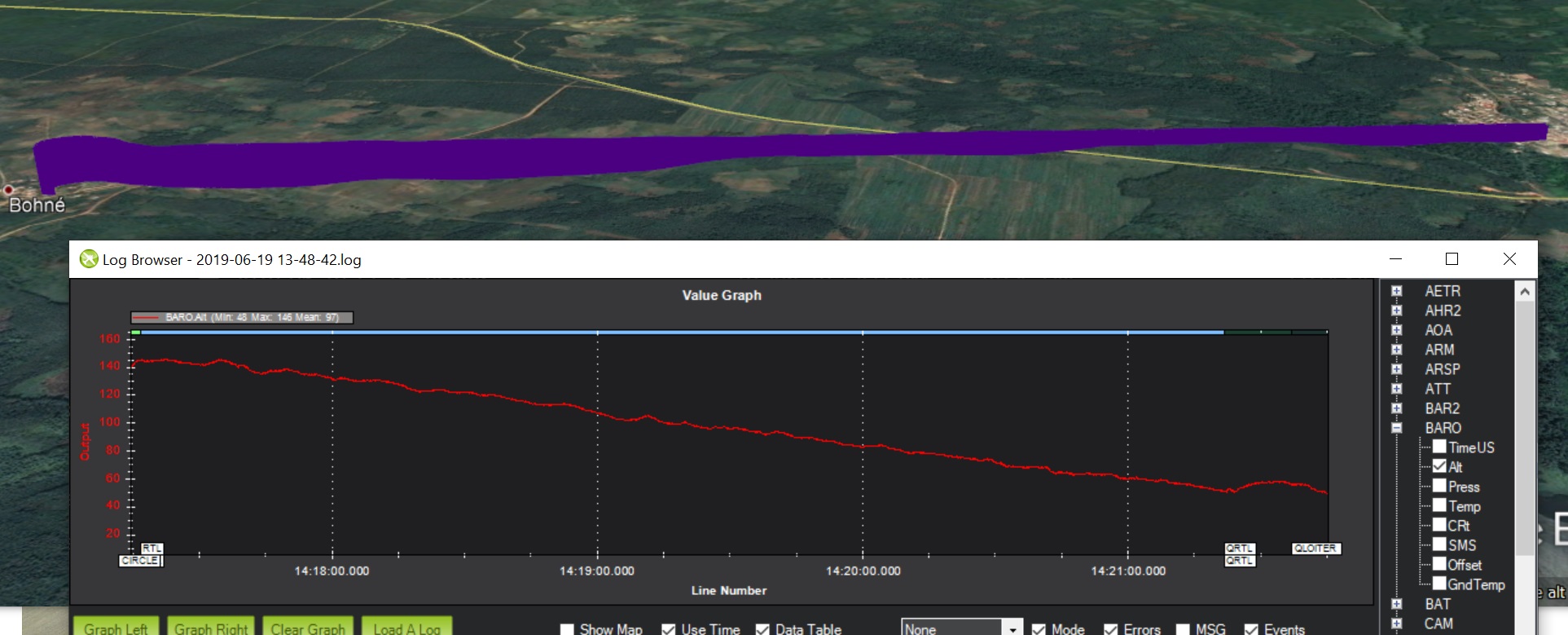
My Nimbus VTOL did a really dangerous RTL yesterday, instead of climbing or keeping a height above arming point, it gradually made a descent until reaching 50m.
A few points :
Never happened before
I am using 3.9.7
Terrain following is off
RTL height is 130m
Baro and gps keep the same offset during the flight, so not a baro problem
your ALT_HOLD_RTL is set to 50 m. i’d say this is expected behaviour when entering RTL in non-Q modes.
on a sidenote, you have all arming checks disbled. especially when using EKF, it is recommended to not set arming checks to anything different from default = 1 as this can lead to unexpected behaviour, possibly allowing to take off with an airframe not ready to fly without even noticing: http://ardupilot.org/plane/docs/arming-your-plane.html
Thanks Basti, I had a few RTL before, but always seemed to use the Q-RTL alt value, I will change it.
And also thanks for the arming checks, it’s something I overlooked when I received the plane, wondering why Foxtech is shipping those RTF VTOL without those. They are setup on all my other machines.