PLND_EST_TYPE = 1 (KalmanFilter) causes dangerous maneuvers. Nearly crashed several times. But the PLND_EST_TYPE = 0 (RawSensor) seems to be adequate.
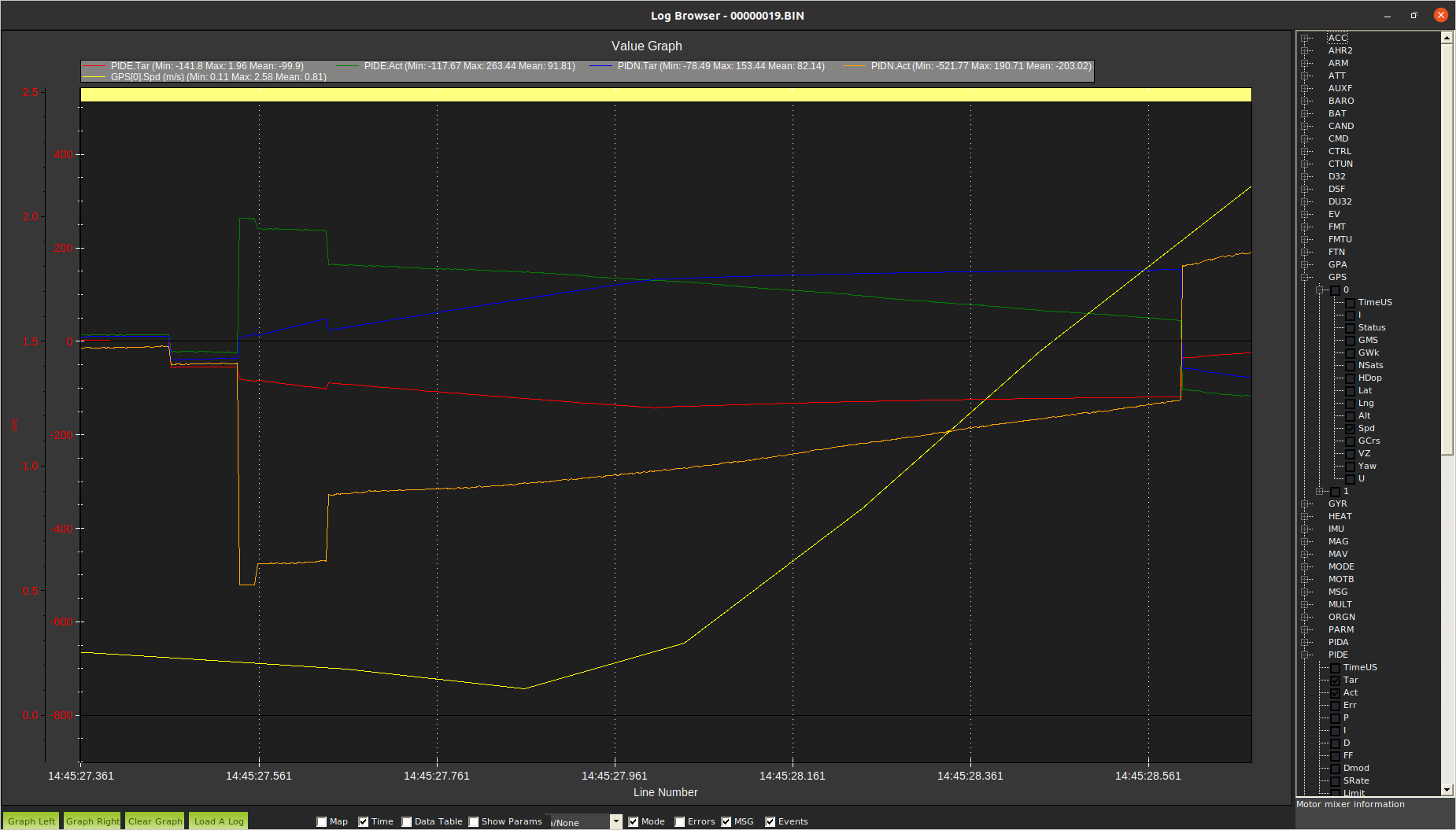
PLND_EST_TYPE = 1:
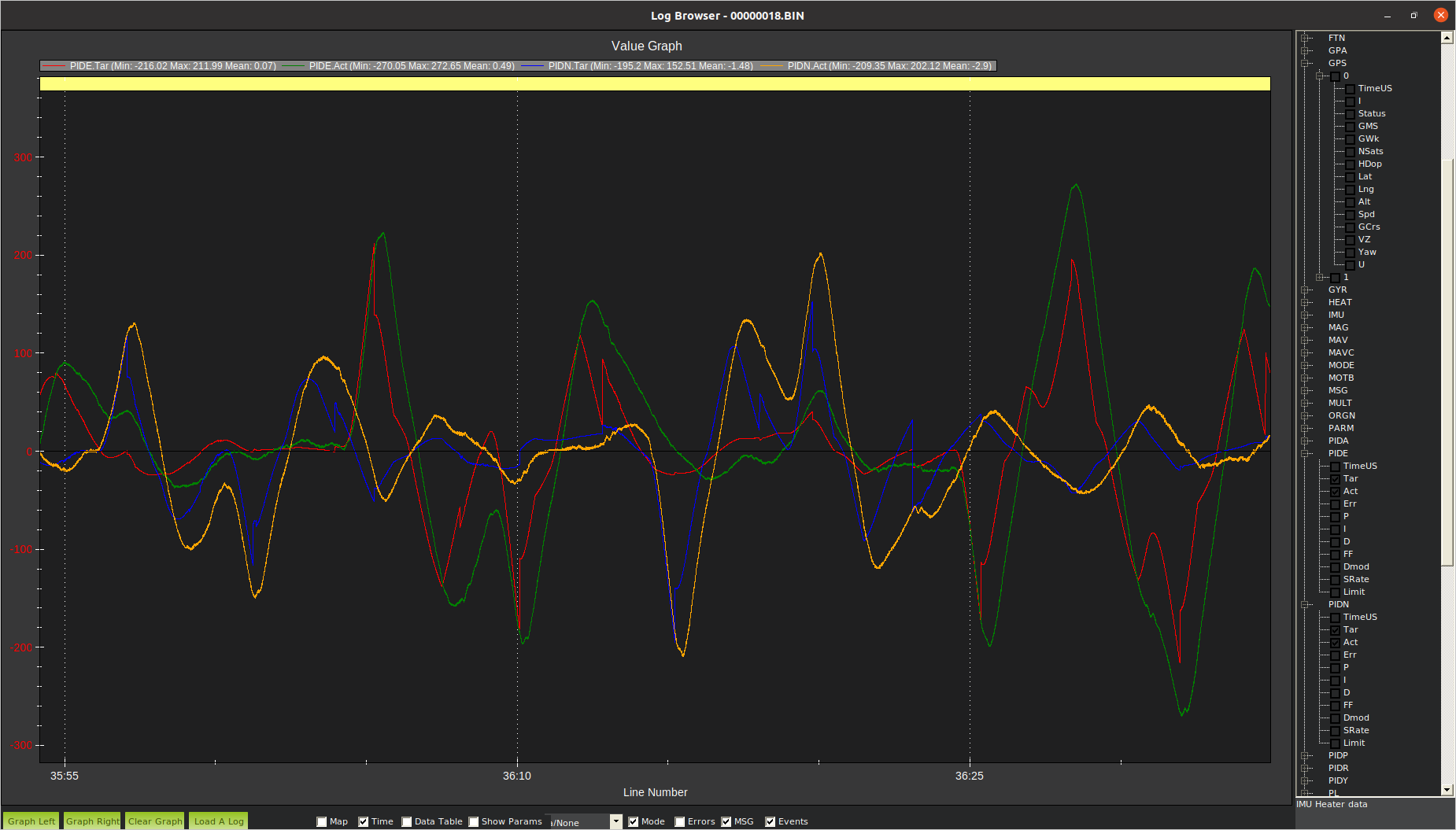
PLND_EST_TYPE = 0:
The graph shows a sharp change in real speed, which is basically unrealistic. Because of this jump, the regulator accelerates the copter away from the landing position at a very high speed. I think this is very strange and dangerous.
https://drive.google.com/drive/folders/1OAD5f-K3MKcwMdJM4v_WDlnwumf-qvmv?usp=sharing