Hey guys,
We were flying our VTOL quadplane drone yesterday, and the we unfortunately had a “flyaway” . When we armed the drone, it just started flying by itself (not in a “crazy” way - it looked like it was flying in auto mode), and we were not able to control it (only at some random points we could add throttle). Then, it flew away ~ 200m from us, beyond our line of sight. When we found it, it looked like it had landed perfectly fine, because it was upright, and there was no damage.
I downloaded the dataflash logs from this flight. The GPS and altitude signal looks correct. The flight mode was always QSTABLISE, never AUTO, RTL, or LAND etc…
This was a bit scary situation because the drone did not obey the geofence radius (it only obeyed the geofence max altitude), and it flew like 100m out of the geofence.
I am not experienced with reviewing logs, so I would appreciate some advice on what to look at , or maybe some of you could help me identify what happened. Hopefully it is something easily explainable or human error
Your fundamental mistake was to misunderstand the mode of operation. This flyaway was pure 100% human error.
In QSTABILIZE the throttle stick represents a direct throttle request for the motors (plus attitude stabilization). I assume you have a controller which springs the sticks to center in all four axes. As soon as you let go of the throttle after arming, it returned to center stick, which commanded the motors to half throttle which provided enough thrust to lift the drone off the ground, and it was then carried whereever the wind took it. You tried to put the throttle back to 0 to get the drone to move down, which it did just fine, but for whatever reason you stopped, the throttle sprung back to the center, and it resumed going up.
As the batteries discharged the thrust dropped, so it landed again eventually and stayed there until you found it. You are very lucky that center stick was so close to the hover throttle; if it were significantly higher it would have just ascended until the batteries emptied, the propellers stopped, and gravity took back over.
As for the fence not working, it was switched off: FENCE_ENABLE is 0. You need a better understanding of how the mode works, a more careful reading of the docs, and perhaps a controller which does not spring the throttle stick to center.
This would be a perfect description of the problem if not for one issue. Our RC transmitter’s throttle stick does not spring back to center… We are using a standard “Mode 2” RC transmitter: the left stick is throttle (up/down, and does not spring back to center) and yaw (left/right, springs back to center), the right stick is pitch (up/down, springs back to center) and roll (left/right, springs back to center). What do you think could have caused the throttle to do this?
Additonally, when the pilot realised he lost control, he turned the RC off to force a failsafe and RTL. Why did the drone not go into “failsafe” or “RTL”?
The FENCE_ENABLE parameter… This must have been our error, because we set it but probably forgot to click “Write Params”.
I would never recommend that. If you turn off the radio you are giving up any chance of regaining control of the machine.
I would check your radio failsafe settings. You may need to set your radio/RX to No-pulses. This is done on the radio, not FC. In the log there is no sign that it recognized the fail safe or that the radio was turned off. Did you test this on the ground before flight? Another thing to do is to set RTL as a flight mode, or set up a switch with RCx_OPTIONS, 4 to trigger RTL regardless of your normal mode switch settings.
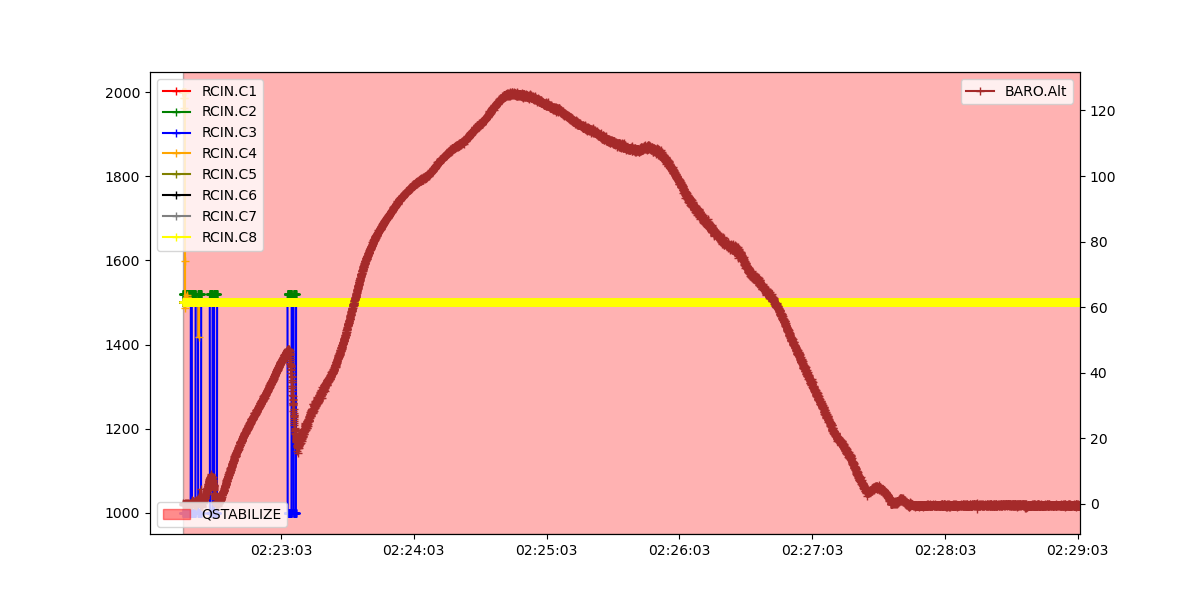
I just noticed that for the duration of the flight the all the RC signals were 1500us, except for two short movements of throttle input where the drone descended, before it climbed away. This makes me think you have a radio problem in general and the FC was not getting any input from the pilot.
@Allister
We have tested the failsafe on the ground, yes. For example, you cannot arm the drone when the radio is switched off. We also had RTL set as a flight mode, as well as QLAND set on a switch on the RC, but for some reason the drone wasn’t responding to those. We had literally 0 control of the drone since we armed it.
How can we troubleshoot this? Because on the ground, the RC signal was perfect and the drone responded in real-time.
As Allister indicated, you may have two problems:
a) Your receiver may be set to work on a default setting if signal is lost.–> This can be useful in regular RC applications, but becomes a problem when connected to a FC. - Please check the instructions of your receiver and see how this function can be switched off so that FC can recognise that signal is lost and RTL (or whatever failsafe you have set) can be triggered.
b) You may have had signal loss which caused this chain of events. This can happen for various reasons I.e. some new device that has been installed but causing RF interference, different motor update settings applied to your ESC’s which can cause interference (I’ve lost a drone because of this), a problem with your receiver, power supply problem to receiver,…
It is even possible that the antenna on the transmitter has been damaged and no longer working as it should.
Some transmitters have a signal test function which allows to you test signal strength to your receiver by temporary reducing signal strength and walking away from your receiver. This will show up any poor signal reception (unless you are dealing with the ESC’s causing this problem in which case it wouldn’t show unless you run the motors).
This are some suggestions to check which may allow you to discover the underlying problem.
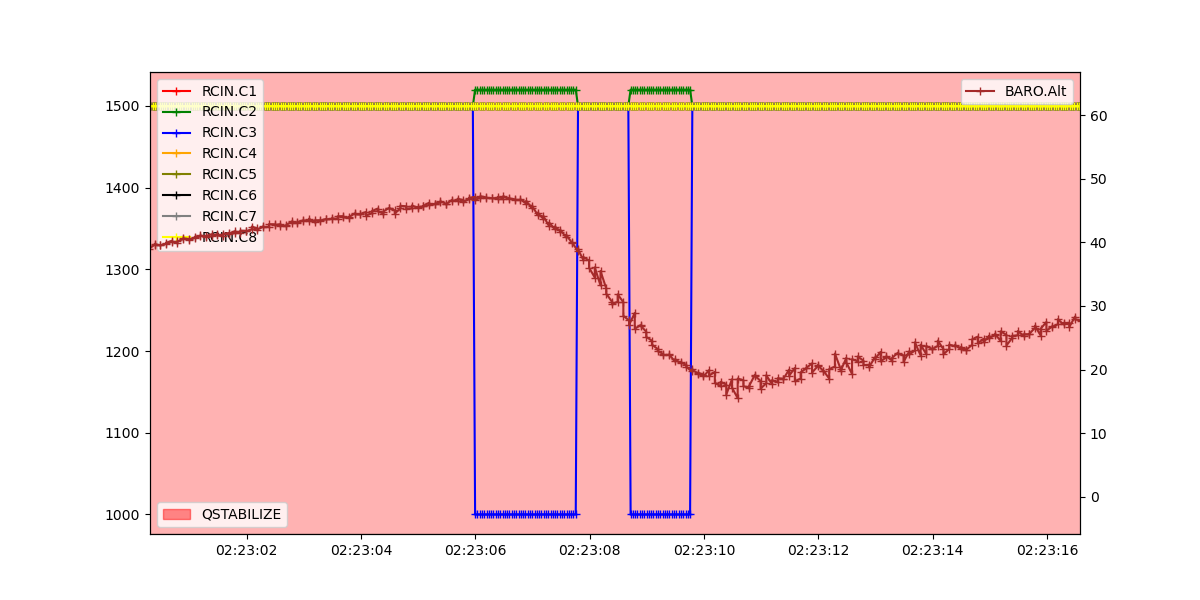
They remain at 1500us for the duration. At the beginning there are some very odd inputs. It’s a little misleading, but the RC3 (throttle) is dropping to 1000 and RC2 (pitch) is jumping from 1500 to 15200. These changes are very sharp and digital, not something that would come from a person moving the controls. To me it looks like a connection is broken and coming back on/off.