I’ve attached my params for this current build.
This is my first Ardurover project, and second Pixhawk project (always used Betaflight/ Inav)
Likely I’m just missing something basic since I’m new to this system.
I have my hardware all hooked up, steering servos configured, tuned, and tested. I have followed the tutorials for setting up D_shot (running D_Shot300 to avoid slow refresh/noise issues I keep reading about) and when I click to test motors, I get the musical tone, and nothing. Bump up the throttle on the controller, nothing.
I’m using a T_Motor 55A BL_Heli32 4in1 ESC, driving 4 independent 6010 130KV brushless motors on 2S.
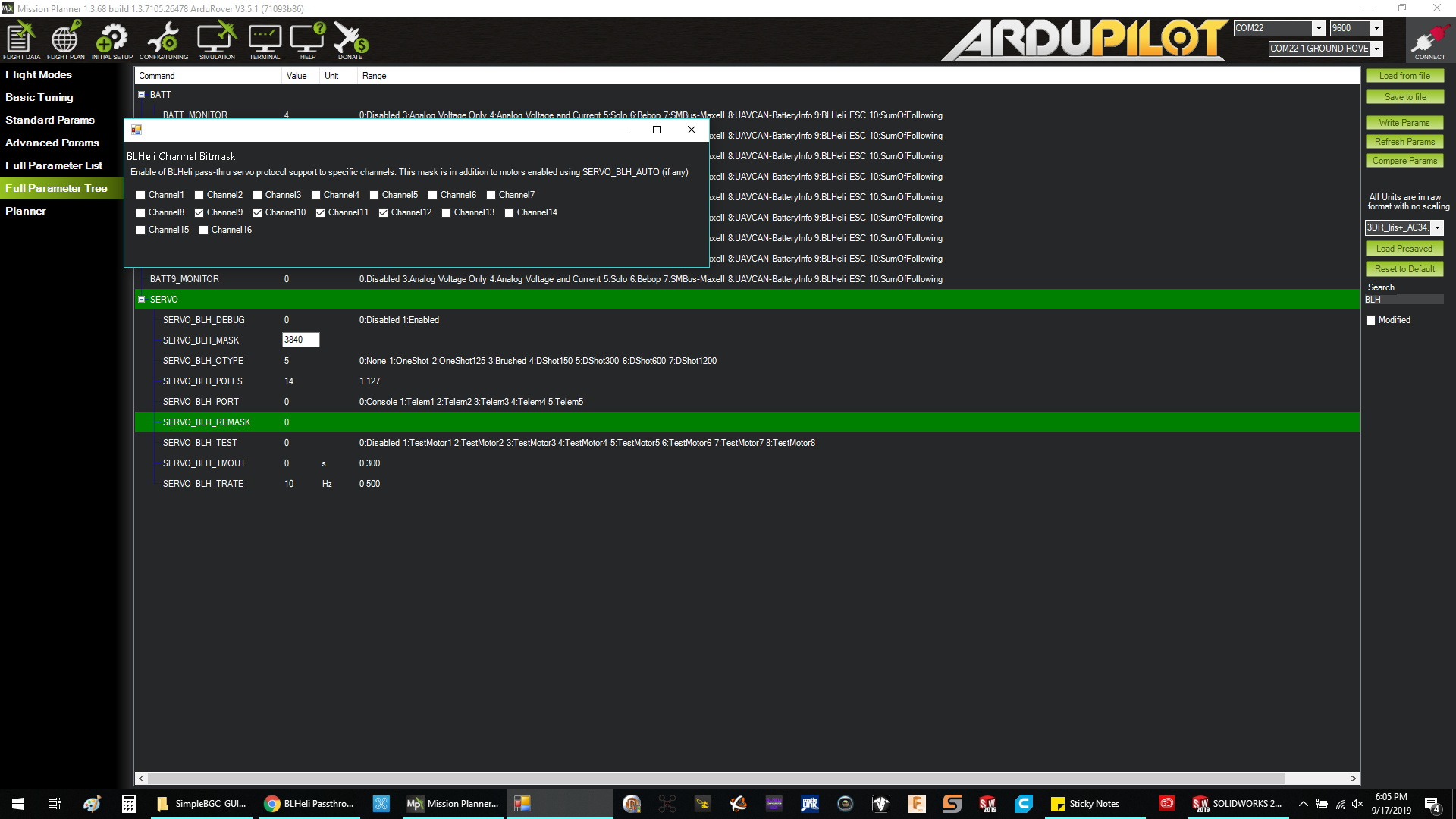
All motors are set to the same channel, motor 1 via the Params, and to run D_Shot300, all pins have been switched from PWM out to the AUX 1-4 pins, which through params were set up to run D_Shot.
I keep trying to come at this from different angles, and am about to watch a youtube video to learn how to do pass-through so I can get into BL_Heli32 configurator and set/ verify the settings on the 4in1.
Plan is to set the ESC to run in “3D” mode, which will put the midpoint throttle at zero, and essentially allow me to pull off forwards and reverse.
I’m using HereLink for control, which is somewhat helpful for the settings I am able to adjust via the controller.
Any suggestions would be appreciated. I know this is achievable, I just need to get these motors moving so I can move on to figuring out gimbal control.
Thanks
15Sep19 params.param (13.5 KB)