Hi ALL!
I built my X quad entirely from cheap Aliexpress parts and it even flyes.
But, motors 3 and 4 becomes very hot after a few minutes of hovering when motors 1 and 2 stays barely warm.
I’ve already tried to swap motors, props and ESC’s and i even tried a different models of motors and ESC’s but the problem remains the same.
The only thing i didn’t try to reaplace is a frame and probably it causing the problems.
I read some topics about the similar problems and found that motors became hot because of misalignment,
which as i suggest is caused by crooked frame.
My question is how i can identify which motor or motors are misaligned?
Is it motors 1 and(or) 2 which stays cool but causing yaw, which requires the motors 3 and 4 to work harder?
Or it’s motors 3 and(or) 4 which have less thrust and therefore have to spin faster?
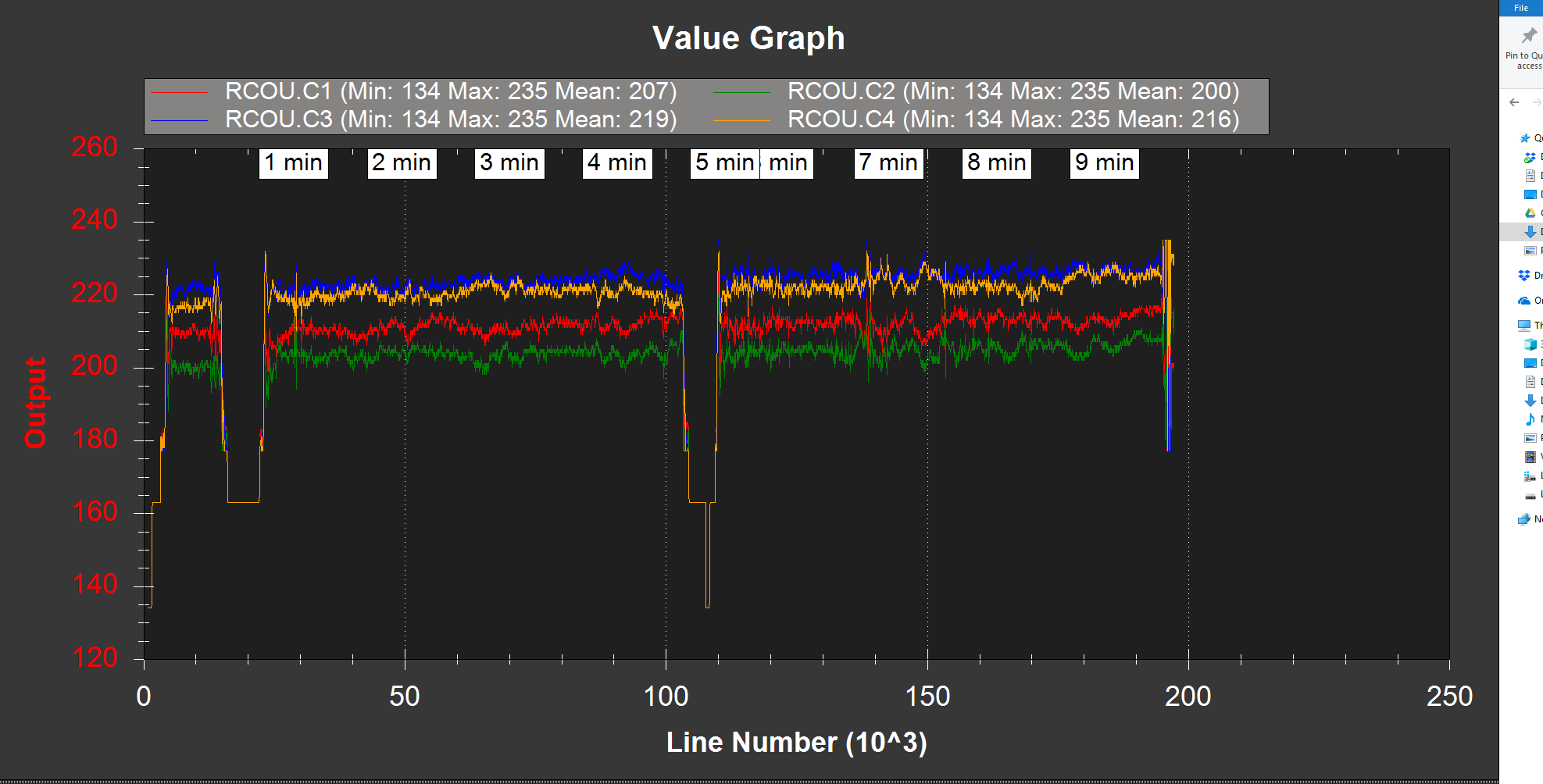
Please see the attached log, it clearly shows that motors 3 and 4 output is higher than 1 and 2 but looks like difference isn’t that much. http://rgho.st/6FRjsw2wk
My current setup:
Motors: GARTT ML 2212 920KV
ESCs : EMAX Formula 32 45A
Props : 1045 DJI-like
Frame: https://www.aliexpress.com/item/FPV-Quadrocopter-X500-500-Quadcopter-Frame-500mm-for-GoPro-Multicopter-TBS-DJI-Spider/32497216065.html?spm=a2g0s.9042311.0.0.27424c4djjbsCg
Pixhawk running the latest firmware V3.5.7
Thanks in advance!