I have been trying to setup a mission with Spline Waypoints, but the vehicle keeps cutting the corners by tens of meters.
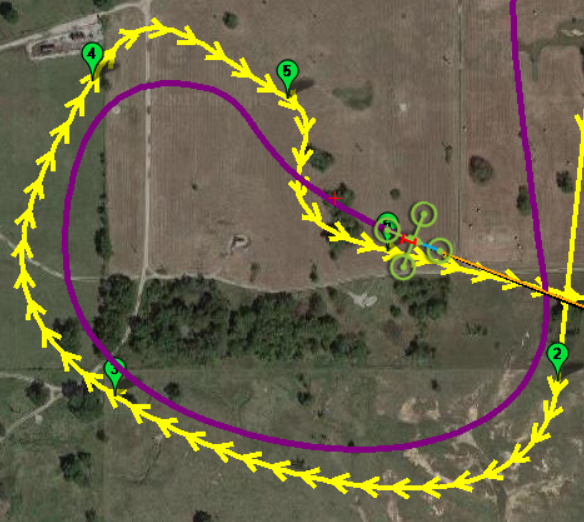
This is something that in the older releases (3.4.6ish) did not happen. The vehicle almost overlaps the programmed spline mission only at very low speed, say 3/4 m/s, while before it would do much better.
I understand there is a leash calculated with the planned velocity and maximum acceleration. In the simulator I tried and set the acceleration WPNAV_ACCEL as high as 1000 (more than 1g) and even higher with no result.
Am I missing something here?
TF