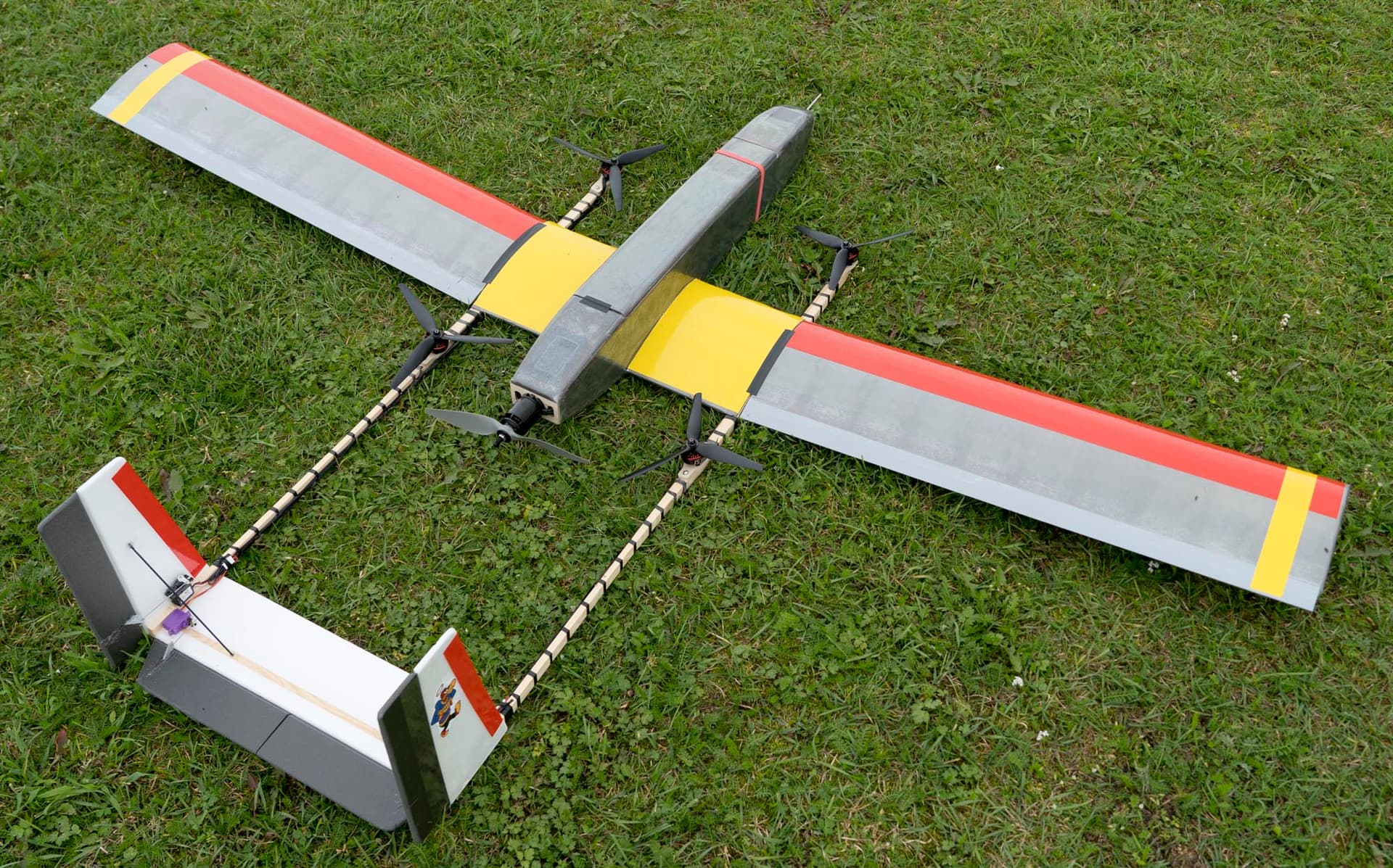
I just wanted to share my own custom quadplane that I built. It is a fast prototype build using cheap materials to test the concept and learn as much as possible about this kind of aircraft in general. I intend to build a better and more capable VTOL quadplane in the future with what I learn from this.
Link to video: Quadplane video
I have managed to get it to fly pretty well. But there is still more tuning and testing to be done. I did use the quadplane quick-tune lua-script, and made a huge improvement compared to the stock PIDs while hovering. The video was recorded right after the quick-tune was done. I later manually de-tuned it a little bit because there were some oscillations, especially during transitions, or while hovering in the ground effect.
Transitions from hovering modes like Q-Stabilize or Q-Loiter to forward flight in FBWA work very well. Also, transitions from FBWA back to hovering is Q-Stabilize. But if I switch from FBWA back to Q-Loiter instead, the aircraft tries to slow down a bit too fast, and usually makes an unpredictable turn before coming to a stable hover.
My intention is of course to continue to experiment and try different settings. I want the plane to be able to fly fully autonomous waypoint missions with hovering takeoffs and landings in a predictable way, even in some wind.
I noticed on the first test hover that I had very bad yaw control. It was almost impossible to point the nose of the plane in the direction I wanted. After this, I tried to angle the lift-motors slightly and this worked great.