Hopefully this is a simple enough question, but I am considering investing in a TBS Crossfire. I am hoping to be able to combine the RC receiver and telemetry functionality into a single package thus eliminating the need for a separate telemetry radio.
I’ve tried doing some research, but unfortunately the information on TBS Crossfire + Ardupilot seems scarce, so before I purchase one, I just wanted to ask a few questions:
Is TBS Crossfire compatible with Bluetooth telemetry in Mission Planner?
Assuming it is, and it appears we use Mavlink here, this isn’t a unidirectional link is it? (I.e. can I still write/upload missions to the flight controller via the TBS Bluetooth connection?)
I’ve heard reports of TBS Crossfire telemetry being slow- how true is this?
Anything else I should watch out for or be concerned about? Thanks in advance!
Thanks for the reply @amilcarlucas. Good to know about Mavlink 2.0 not being implemented. Does that mean it does work (at least with Mavlink 1)? I don’t use my telemetry for anything extravagant, just monitoring my battery voltage and the like. I haven’t even flown an auto mission yet, but it would be nice to be able to upload a mission too.
i am using it since 2 weeks. I like it as it is very integrated.
Time to time I loose the telemetry
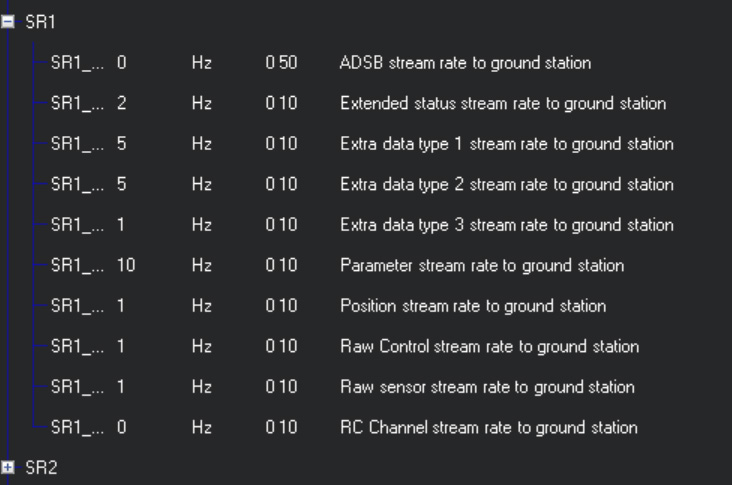
Can you please post your setup (SR parameters in arduplane & TBS setup such as power)
I tested the latest TBS FW .
It only took 12 minutes to sync parameters after connecting to the latest mission planner over bt.
For us this is NOT usable.
Very interested in this topic as well. My question is pretty closely related to your post so I won’t start a new thread. In general I’d like to know if 2-way telemetry exists between crossfire and mission planner. Meaning, can I use mission planner to send missions to my plane using the crossfire as well as use crossfire to view live mission data on my laptop. (via bluetooth from my transmitter of-course)
afaik in high bandwidth mode (RF mode 2), MAVLink frames will pass through the device directly with a significant frame drop rate due to bandwidth limitation over the RF data link, parameters and other MAVLink frames are intended to pass through in this mode.
In low bandwidth mode (RF mode 1 or below), due to bandwidth limitation, MAVLink frames received by the receiver will be unpacked into Crossfire internal telemetry frames and passed through the RF data link, then repacked into basic telemetry frames (same as MAVLink emulator), in which other MAVLink frames are not intended to appear on the transmitter side.
so based upon my individual testing and available information, real full-range fully bidirectional MAVLink is not supported by CRSF as for now.