I read the documentation and several relavent threads but I don’t see an answer to my issue in them so apologies if this is re repeate:
Getting correct voltage read but no current Using pixhawk 2.1 with included sensor
I read the documentation and several relavent threads but I don’t see an answer to my issue in them so apologies if this is re repeate:
Getting correct voltage read but no current Using pixhawk 2.1 with included sensor
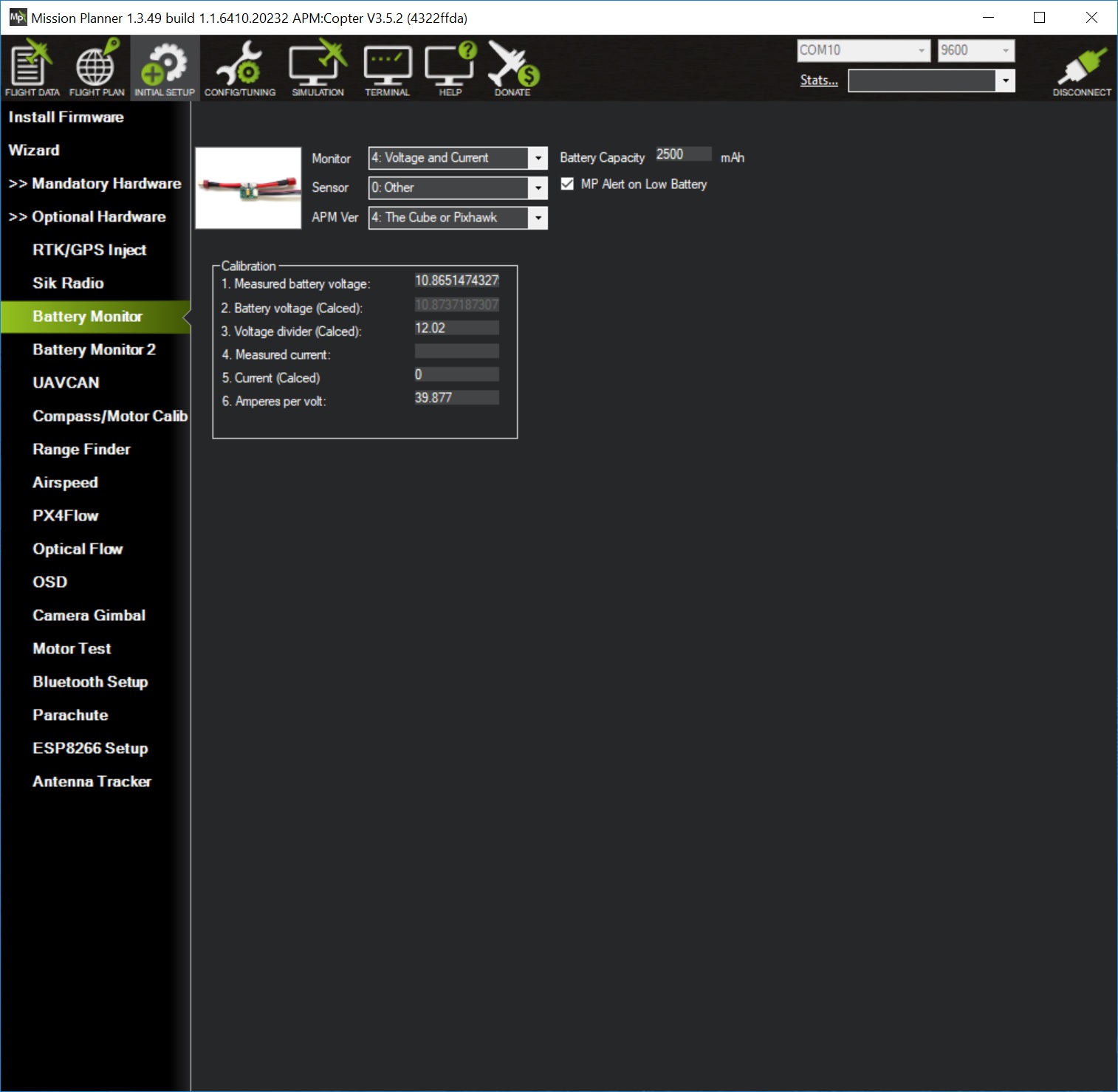
The voltage divider and amps per volt settings are WAY to high…
Voltage divider should be close to 10 and amps per volt should start at 17.
Use this to calibrate the voltage: http://ardupilot.org/copter/docs/common-power-module-configuration-in-mission-planner.html
I have a better way to calibrate current…
The basic process is you take a fresh battery and make a flight of 5 minutes or so, land, disarm and unplug the battery.
Charge the battery and record the mAh charged. We will call this number “CHARGED_MAH”
Now take a look at the flight logs and find the total current used. We will call this number “LOGGED_MAH”.
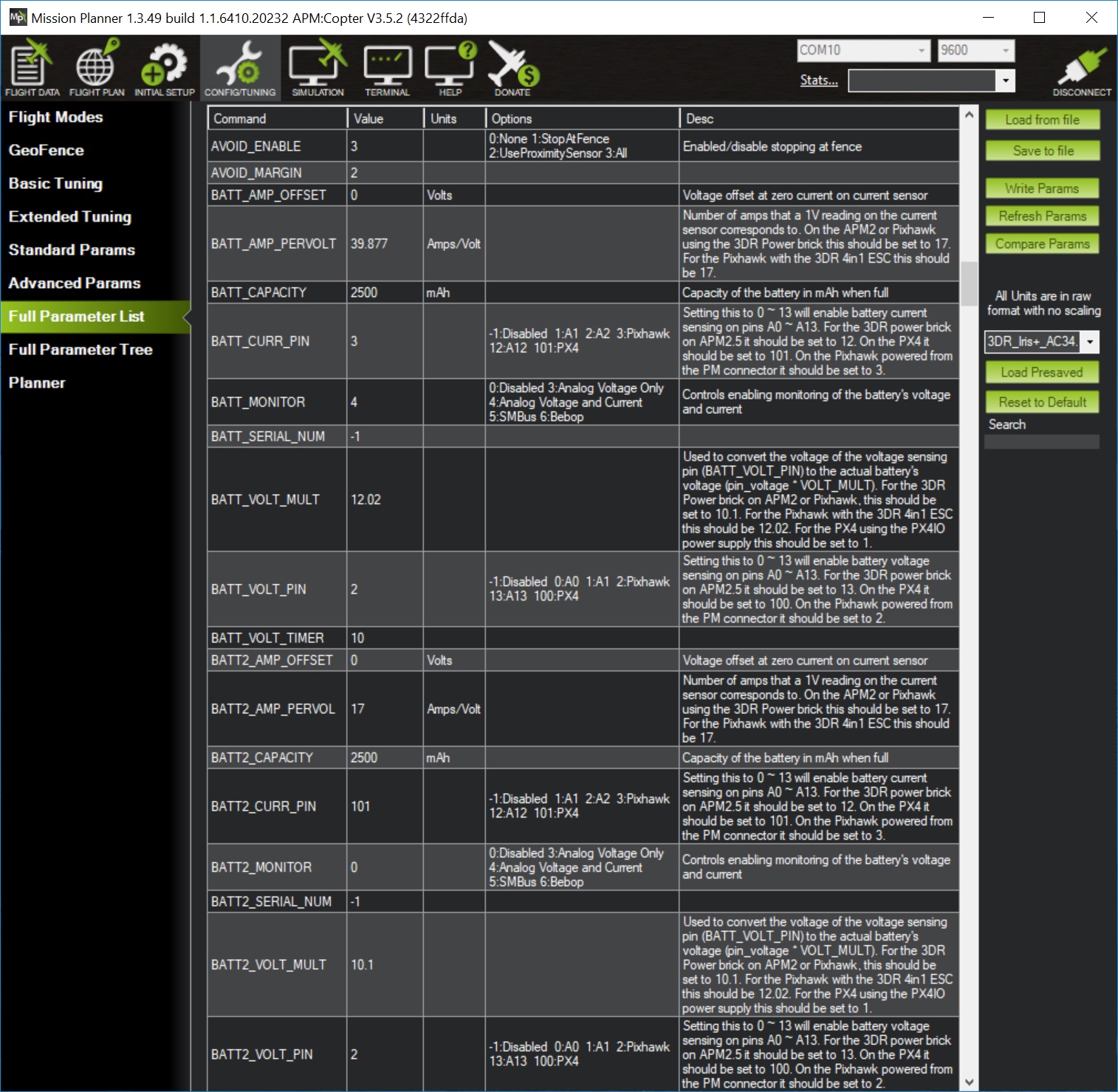
Next look at the BATT_AMP_PERVOLT parameter and record that number (by default its something like 17…). We will call this number “OLD_AMP_PERVOLT”
So, let’s say LOGGED_MAH was 1300Mah, and CHARGED_MAH was 1500mAh, and OLD_AMP_PERVOLT was 17.
We can use this formula:
NEW_AMP_VOLT = (OLD_AMP_VOLT x CHARGED_MAH) / LOGGED_MAH
NEW_AMP_VOLT = (17 x 1500) / 1300
NEW_AMP_VOLT = 25,500 / 1300
NEW_AMP_VOLT = 19.61
Set BAT_AMP_VOLT to 19.61 and click “Write Params”
Take a fresh battery and make another 5 minute flight.
After one or two iterations you should be well within ± 200mAh…
Power Monitor Calibrator.zip (6.2 KB)
I have attached a spread sheet that will do the math for you…
An excellent explination on the calibration side but no matter what value I put into the amps/volt and write the current remains 0 if I play with the other battery meter types I get steady state amp readings regardless of usage. maybe damaged ammeter?
One problem I’ve encountered with some of shore battery monitors is the 6 wire cable is not assembled properly.
One way to tell is to lay the cable out flat and look at the connectors. One connector should be “lock side” (the side with the pin locking tabs) up and the other connector should be “blank side” up.
verified wire is correct no issues there . Also ive now tried an addition 2 Hex voltage/current meter and get the same behavior maybe they are defective?
You should notice in the above screenshot that no current is being measured at all the field isn’t 0 its blank all together if someone with a 2.1 has had any success please show me what you see using your included v/c meter
Put an oscilloscope to the outputs and the current out is noise I confirmed by setting amp/volt to 1000 on the pixhawk and got garbage values ranging from 0-45 amps in random increments so I must assume then the voltmeters are all defective as the scope shows noise on that channel as well will have to play with it and see how the differential opamp is setup to see if its even wired correctly
Hey. Did you manage to configure the current sensor? I have 3 different power modules: 3dr, hollibro, Chinese. And no one does not show current. Somewhere just one value. Somewhere in the range of 0.2-0.5 something happens. Already I do not know what to do.
I’d wager the 6 wire cable that connects the PM to the Pixhawk is miss-wired. The way to tell is to lay the cable out flat on a table or workbench. One connector should be “pin lock” side up and the other should be “solid white” side up…
Hi. I have the same issue with my drone. Have a pixhawk 4 powered up by the PM board through a 6 wire connector. Voltage value is accurately displayed but the current is displayed as 0. How do I know if the connector is correctly wired. Do you have any pictures