I’ve noticed an amperage mismatch from what a multimeter displays with what an AttoPilot 90A shows through Mission Planner. I can’t comment on 3DR’s Power Module because it didn’t have the voltage range on the first boat, and the second one I choose to try a PX4 instead of an APM2.6.
As best I can tell, this is attributed to the fact that the AttoPilot is ranging from 0-3.3V, while the code has INPUT_VOLTAGE set to 4.68 in config.h. Does anything else rely on INPUT_VOLTAGE or is it a different issue altogether? Thanks
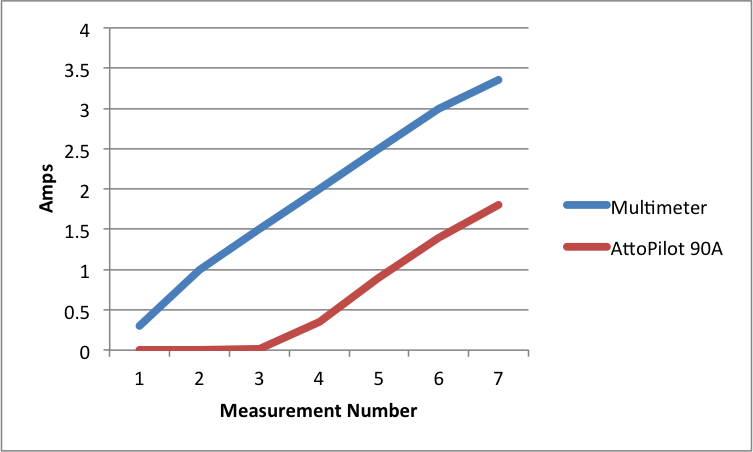
Upon further research, it appears I have a ~1.5A offset between what a multimeter measures and what the FMS records from the AttoPilot. While I can change the slope of the line via the Amps_per_Volt variable, there is no way currently to shift the line up to reasonably match. Basically I can’t find a way to change the ‘b’ value in y=mx+b, only the ‘m’ term with Amps_per_Volt.
Unfortunately I have also not been able yet to get data above 4A because loading the motor up to its normal 35-40A requires river testing (the fun of boats…) and a higher capacity current meter. But I’m also not looking for high accuracy current data, just a reasonable approximation.