I got a fresh cube orange, installed ArduPlane 4.0.5 on it, did all the calibration but have the problem that the servo output channels all seem to be giving no signal.
MissionPlanner and QGroundControl show 5V on the servo power, i made sure that ground is connected to ground and signal to +.
To make sure my servo is working i create a simple PWM arduino program, using this the servos work fine.
I made a arduino program to read the PWM data and only get 0 from all channels.
In MissionPlanner and QGroundControl the RC values work flawless and the output servo shows correct values between 1100 and 1900 PWM.
I am out of ideas what might cause the issue of getting no signal on all servo outputs. Even makes no difference if aircraft is armed or not.
Does this mean the cube is broken and i need to send it in? Am i overlooking something or can i somehow debug this more?
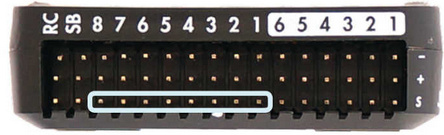
When you say “ground is connected to ground and signal to +.” do you mean signal wires are connected to the “S” pins as in this diagram or the “+” pins?
The servo ground/0v connection goes to “-”, and the signal to “S”
If using the servo rail to power the servos then the servo power wire goes to “+”
@iampete: hey, thanks! … actually BRD_SAFETYENABLE obviously was disabling all output. Got a bit confused with all the failsafe / security / safety switches.
Would have assumed that raw_servo outputs always show the real values and since they were showing the actual values i did not assume that safety sets them back to 0.
@xfacta yes, sorry for my wrong naming, signal is connected to s.
Thanks everyone - i seem to be getting signal now!
Hi mate, sorry for writing so late, I’m also trying to read the data from my pixhawk channel 1 and 3 for steering and motor, and it always gives me a value of 0, I don’t know what I’m doing wrong. The first thing, what type of function or system do you use to read the servo parameters? With what function do you read the PWM? What steps do you do in mission planner so that it pretends that it is walking even if it has nothing connected?