Can one of the masterminds look at this log. A friend is having issue with motor 6 after 10 good flights.
He changed the motor and esc’s 100 amp but still a fail issue.
Also can someone recommend a good dshot esc for high voltage use?
log
Can one of the masterminds look at this log. A friend is having issue with motor 6 after 10 good flights.
He changed the motor and esc’s 100 amp but still a fail issue.
Also can someone recommend a good dshot esc for high voltage use?
log
Hi Brandon,
What motors and ESCs?
And prop size too please.
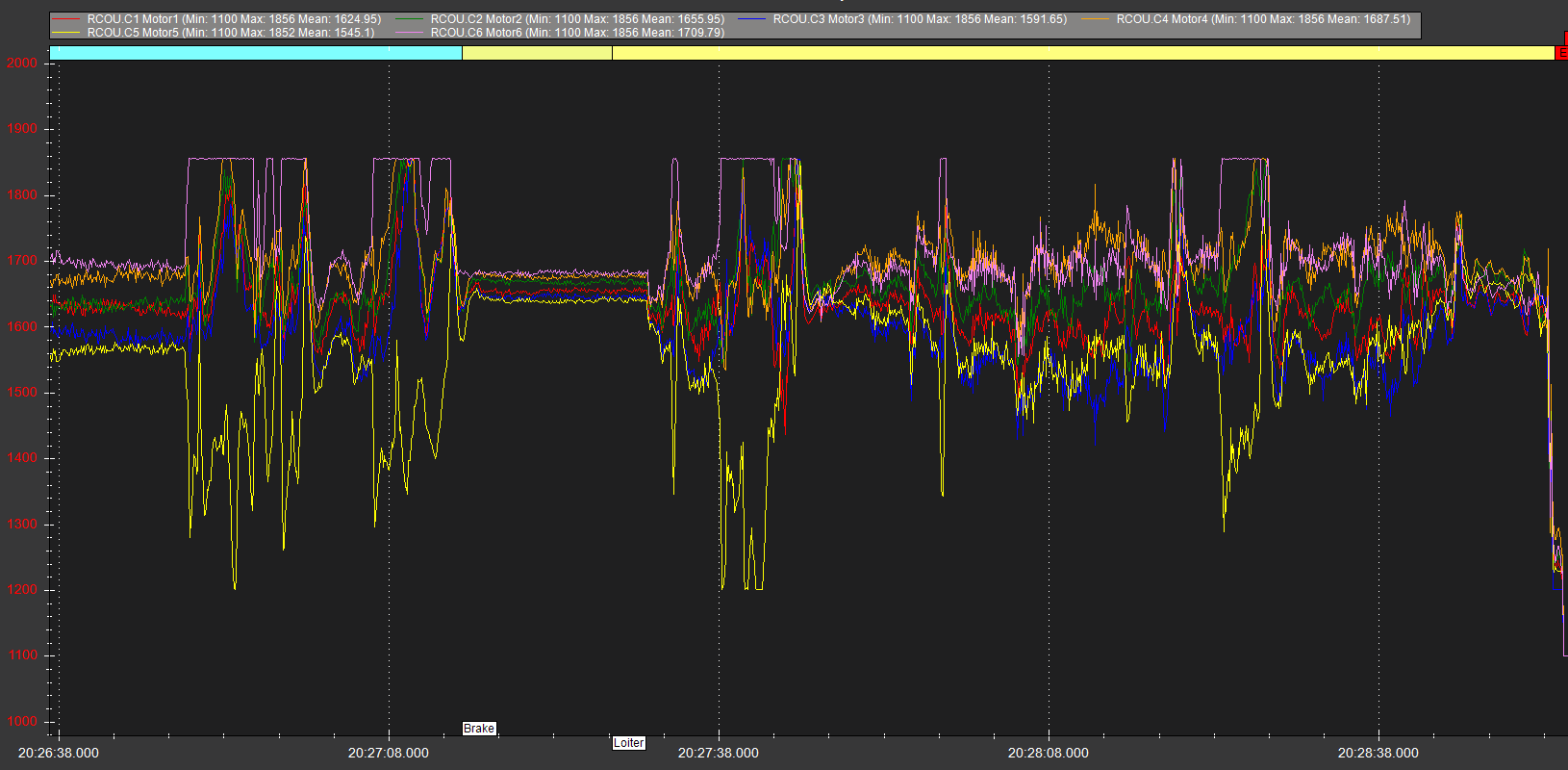
Motor6 is working harder than the others all the time, and Motor5 is working correspondingly less.
The motor outputs are a little like there is both of some motor-mount twist and some COG/weight imbalance. Neither are very bad, but obviously Motor/ESC 6 are not happy.
Generally the motor outputs are high, like the copter is at it’s upper weight limit.
The effects can be seen with Motor6 sometimes being commanded to maximum, as if weight shifted (less likely) or more likely there was a desync or slipping prop. I would check motor and ESC temperatures right after one of these incidents, but there’s no sign of crazy PIDs or D term being too high.
These events dont seem to align with any particular pitch, roll or yaw movements - so these problems are independent of what the copter is trying to do and probably not caused by demands.
Unfortunately there is no current monitoring, but 100amp ESCs at approximately 12S voltage seems like overkill when some of the parameters indicate props are probably in the 16inch to 20inch range.
My guess is T-Motor Flame ESCs are involved.
My recommendation would be the APD 120F3 which will do DSHOT and has an “industrial” level of quality and reliability. The only down-side is they are bare ESCs so require some sort of mounting system, maybe a basic 3D print. The good thing is you can mount them inboard and the power wires will be short - motor wires will be long.
Unfortunately the next ESC down, 80F3, only does 8S and it would probably be suitable apart from that.
If you wanted to stay with T-Motor there is the new Cine BLHELI32 ESC
https://store.tmotor.com/goods-1326-C80A+12S.html
I dont know of any in use and there’s no real information on the T-Motor site, but you’d think they should be OK running the BLHELI32 firmware.
Unfortunately their 8in1 ESC is only suitable up to 8S, otherwise that could be a good choice (and have two spare ESCs)
Sorry for my late response here is the information you requested:
28" props
it is actually a MN801 kV120 with alpha 60… know it as “the friend” ![]()
@xfacta i have seen in the past de-sync issues on Alpha ESCs when using Tattuu HV batteries and i was never able to sort it out. Have you ever experienced something similar?
As for your APD120F3 suggestion since i would also love to use them on a HAxa of my own that happens to have the ESCs enclosed in the frame, do you think using additional Heatsinks would be wise?
APD recommend airflow over the ESCs but there’s no mention of heatsinks. I know they can handle the full rated load and only get warm.
Probably a simple 3D print that just supports the ESC without being fully enclosed is probably suitable.
APD have the 3D model on their website so you can build around it. Also contact them and they can build cases for you if required.
In my own use of them I have not allowed anything special and the ESCs are in the frame with hardly any airflow.
On any of your setups, have you used them with 12S HV batteries?
No, I’ve just got 6S Lipo for these babies, which ironically is probably more stressful due to more current (less volts).
I dont have the resources to build all the copters I’d like to, so I have to be satisfied with other peoples ![]()
Acc. to APD not a problem at all!
Dear @KnoPhi ,
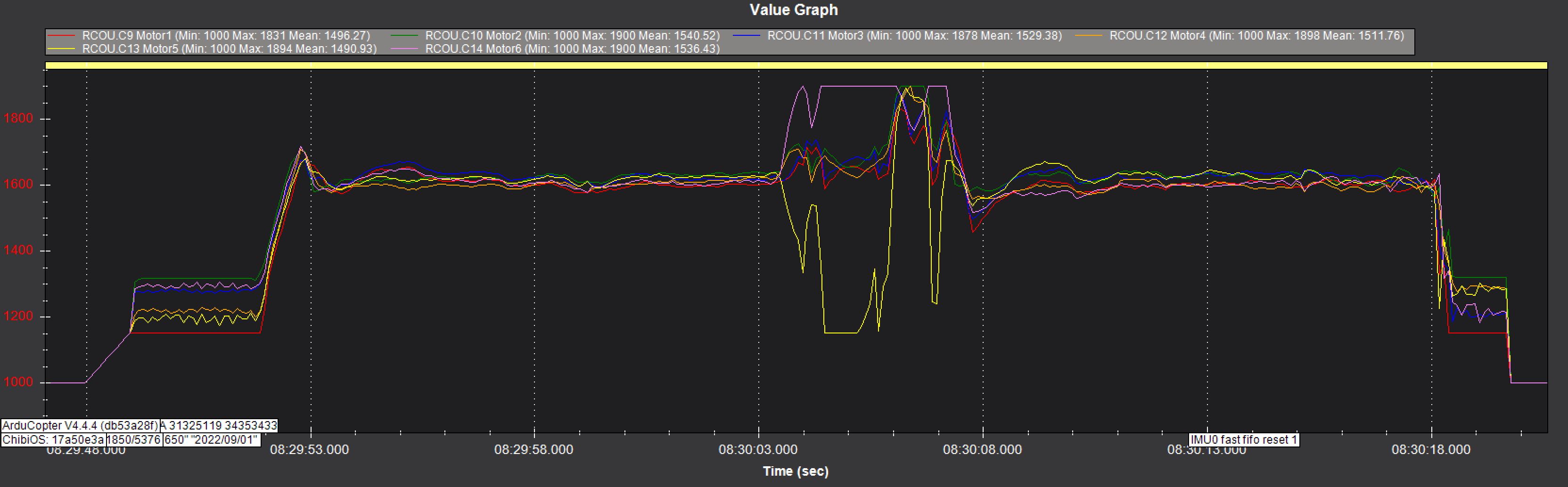
I looked at this log my self earlier today and noticed that with the NEW dshot ESCs you got you also have Telemetry now.
As i Can see at the Tmotor website, 801 120kv specs say for a 28"9.2 prop but from what i recall you have 288 and i can see the RPMs of the motors maxing out and the PWM values also.
Im posting your log through my cloud to see if any other guys have any ideas on this.
I also noticed that on 5.32.397 M6 and M5 maxing out, trying to compensate each other and that PID values now need minor changes.
In addition i noticed that even though your vibes have lowered a bit from the past on IMU2 there was one clip during the start of your flight and that IMU0 and 1 have Higher Z vibes, leading me to thing that what ever creates those vibes resonates at the frequency of the IMU isolation.
@xfacta what do you think? Also based on your experience with APD, if all settings are done for Dshot and ESC values set to 1000-2000, those are taken automatically on the ESC? Because even though i can see Servo9-14 set to 1000-2000, ESCs seem to max out at 1900, maybe mot_spin_max needs to me set to 1?
Exactly what size props are these?
I think the thrust expo should be:
MOT_THST_EXPO,0.76
I dont know why you have RCout 1 - 8 set to RCin channels, that is pointless unless you have something connected that needs one those inputs. But it wont be affecting flight, just more complexity than required and potentially confusing.
Outputs are within normal range, but a fraction high, indicating some slight over-weight/underpowered configuration. For your information, when using DSHOT or some non-PWM protocol ardupilot converts the output values to their PWM-equivalent for the purposes of logging.
Increasing MOT_SPIN_MAX wont help at all and is best left at default value. That last 5% of allowed range doesnt translate into extra thrust, just more battery load.
MOT_SPIN_MAX,0.95
Z axis vibrations are definitely a little too high and they should be investigated and improved before continuing flight.
Attitude control needs a bit of work, but Autotune will sort that out once the vibrations are fixed.
The harmonic notch filter is not getting down low enough with those big props, adjust these for a start:
INS_HNTCH_FREQ,30
INS_HNTCH_HMNCS,3
and the other reason for that is the correct number of motor poles making the RPM calculation wrong.
SERVO_BLH_POLES,28
Also I would set these:
PILOT_THR_BHV,7
PSC_ACCZ_I,0.8
PSC_ACCZ_P,0.4
ESC temperatures are nice and low, so that’s good. If you can sort out the vibrations then Autotune should sort out the remaining attitude control issues.
Send another log of a test flight after those changes.
the prop size is 28x8", as we saw that the rpm of the motors are very high i am thinking of enlarging the motor size from MN801 120 to MN805 150. in a first step i will try to get 28x9" props to see if the rpm lowers.
reason is, that all tests have been done now at low altitude and we need to fly up to 2500AMSL quite often.
The RPM values are wrong unless you fix that, so make sure you change this first, plus the other parameters I recommended.
Then let’s see what the motor outputs are like before you go changing more expensive parts.
just did that and we’ll have logs available soon! i didn’t get the wrong rpm setting but now I saw what you mean!
tanks for your help!!
what we did is that we took off the quickmount from acecore because we thought the prop came loose in flight and made a strange sound.
now we applied the changes you suggested, hardmounted our payload and now a motor stopped in flight and produced an almost crash!
here the corresponding video and log:
When there isn’t a desync the thrust/weight is low at ground level with an average output ~1650µs. At altitude it’s only going to get worse. I think you need to improve that situation.
My Gut feeling is to copy the old param and start fresh calibration, add the new recommended Dshot and reduce the prop size to 22. Test fly without payload and keep the stock tuning for now. Later you can input a better tune but only in small measures… KIS keep it simple. If that does not work ditch the motors for a different brand name and reduce battery weight.
So you mean we fly overweight?
how can i say its definitely a desync?
i can fly with less weight just to check the settings. at the moment we fly with 12kg payload plus 50000mAh batteries.
Yes. Even if you were not flying at altitude, which will reduce thrust, you would want hover thrust to be closer to 1500µs average output. Under demand if you encounter Thrust Loss errors this will be the reason.
That’s not so easy to determine. Rule everything else out 1st.
Then what is the take-off weight of the craft?
TOW is 34kg.
with respect to the t-motor spec-tables we should be at slightly over 60% on hover but our prop has one inch less pitch than their test setup so we will need more rpm to lift.
(our prop is 28x8 instead of 28x9.2 from the tmotor table)