RC Radio set-up that will, “plug-and-play” with ArduCopter V4.3.6…
SUMMARY of this post:
-
intending to share a plug-and-play RC setup. If you want to buy a receiver-transmitter that will, “just work” with CubeBlack here’s an option.
-
Describe the challenges I faced (with first Spektrum DXS attempt)…if you got that to work reply with a solution!
Details…
I appreciate the many, many options Ardupilot supports for RC radios and receivers. It makes sense that folks with good experience with this-or-that brand or feature set would want it supported by ArduPilot and the various hardware platforms. However, if you’re not experienced with RC and you want some confidence something will, “just work” out of the box, here’s an option.
I first bought a “Spektrum DXS” 7-channel transmitter that came with an AR410 receiver. I thought this would be great given the CubeBlack PX4 carrier board has a committed “spkt” connector! Plug-n-play I figured. As is typical for me it was more like plug-n-pray. I did NOT get this to work! If you did get the DXS-AR410 or equivalent to work into a Cube setup, reply below for the benefit of others!
Back to my happy path…
I started over with an FR-Sky X8R receiver and to make that work needed a new transmitter so I went with the Taranis Q X7.
Couple (funny) details:
- The Taranis Q X7 comes with no battery (at least the one I bought).
- Once I bought the battery now I need to figure out how to charge it…I think I’ll get it worked-out with the universal charger I have here for my LiPO’s.
Those are two more “funnies” I call them. I did cheat a bench power supply voltage into the battery cable in the meantime.
The receiver is wired as-shown in the first picture: just as simple as you’d expect: X8R “SBUS” to “RCIN” on the PX4.
-Don’t be confused by the jumpers that you get with the X8R.
-Don’t be confused by some online references to “special cables”.
I think the “special cables” are for “telemetry” links to the same Taranis RC transmitter you’re just wanting to use for RC (that’s another newbie confusion: the difference between “telemetry” link and RC link).
I’ll cover my “binding” next when I follow-up with a video editing my “model” in the Transmitter. The Taranis display is nice but if you’re totally new to it it’s a bit confusing. I’ll share my trip-ups and resolutions in a later video on this thread.
I did get the Taranis Q X7 Bound “bound” and a “model” setup within it for my “quad” (more to do there, as I don’t think I like my stick assignments, and I have no idea what these other knobs and levers might be useful for. Again, more follow-up later).
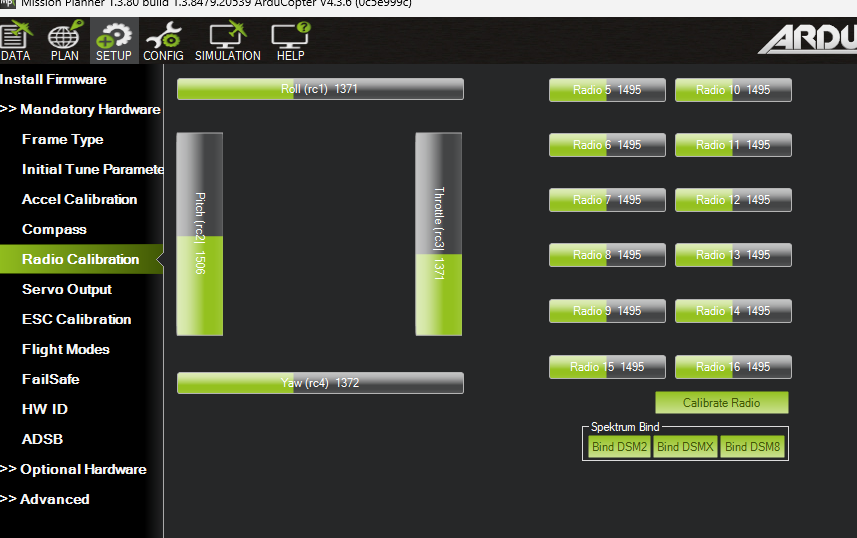
Of course my Spektrum messing-around delayed my happiness a little bit…after I figured the new SBUS should, “just work” I’d visit the “Radio Calibration” screen but just as with my Spektrum foray…but no joy.
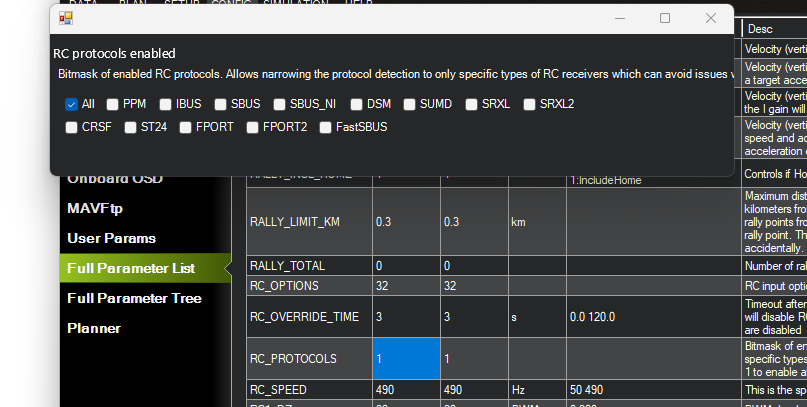
Then I remembered I messed with ONE parameter trying to get Spektrum to work! I had changed the default “all”=1 to DSM=32 (because I thought Spektrum wanted DSM…but there again very confusing with DSM2, DSMX, etc etc).
I changed back to ALL and got happy! Green Bars on the “radio calibration screen”
To Recap:
- out-of-box Cube Clack ArduCopter V4.3.6…NO parameter changes needed!
- Taranis QX7 to X8R receiver SBUS connector to PX4 “RCIN”.
This will, “plug-n-play” for you once you have the QX7 “bound” and an “model” configured. I’ll cover this next but for now you can shop with confidence.