I contacted Cuav’s technical service and they quickly answered that it could be a hardware failure. They also suggested me to try to disable the third IMU.
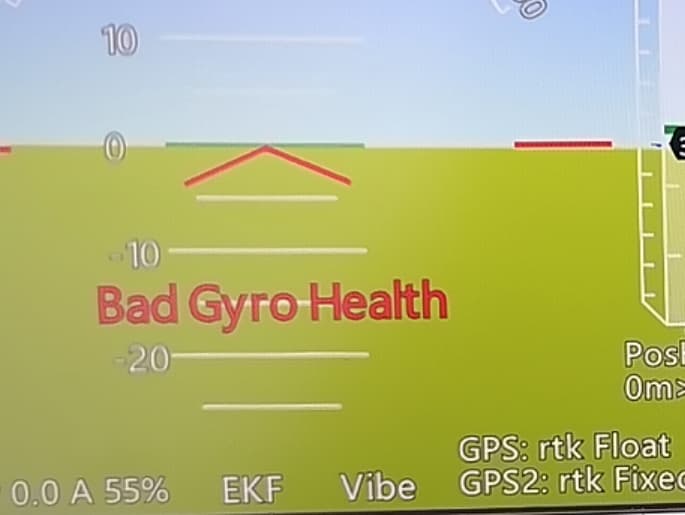
In this case it did let me arm and take off but we got an inconsistent Gyros message.
Received and installed new Cuav V6X flight controller and surprisingly I keep getting “Gyros are not healthy”
I have downgraded Fw to 4.3.5 and the result is the same.
I have been disconnecting peripherals one by one in case they affected the gyros, but the error persists.
After many reboots, occasionally gyro3 starts working again, but on subsequent reboots it stops working.
It seems very unlikely to me that two flight controllers have the same hardware failure.
I believe you should definitely use the latest stable firmware, and Pixhawk 6X firmware should be correct.
Maybe set LOG_DISARMED,1 and provide a couple of new .bin logs - one with all gyros working, and one with the problem.
Should you have EK3_IMU_MASK,7 ?
I’d like to call in @tridge to confirm if a new HWDEF is needed. EDIT: I see the CUAV v6x is listed in the same HWDEF which is nice, still wondering if some adjustment is needed.
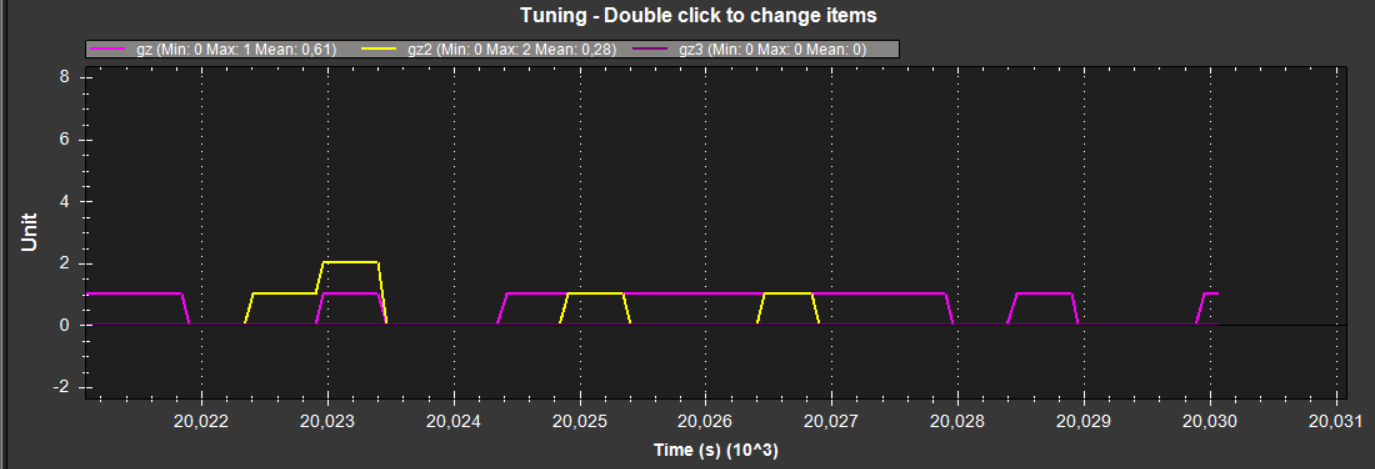
In the log provided so far, the IMU0 GHz cycles up and down for a while, and IMU2 GHz is at a vastly different rate compared to the others.
Unsure if these are signs of an issue or expected.
The first Autopilot shows strange behaviour on 1st IMU (lots of noise and unhealthy gyro)
2nd autopilot is fine (up to now)
3rd autopilot suddenly could not get the data from the 3rd IMU. (Just finished tuning on multirotor maybe after 3-4 flights with less than 5 minutes for each flight)
Now we are not sure whether we should operate with the 2nd autopilot or not…
As our engineer said, it could be a hardware failure, I spent a lot of time, and the test results finally pointed to the chip. Please contact us for a solution.
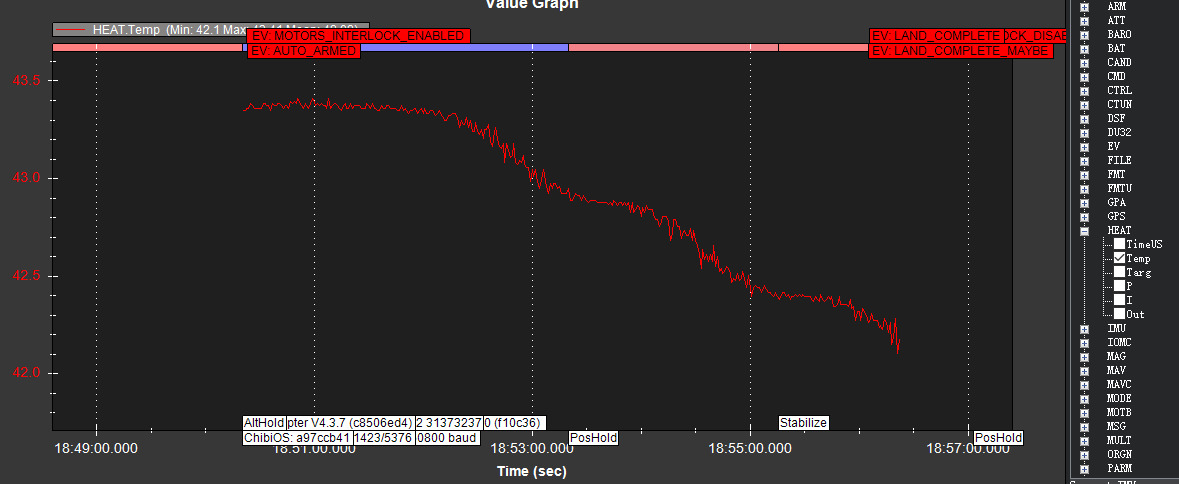
Hi, all, we found that some ICM20649 cannot start at high temperature in a new batch of pixhawk v6x. Our engineers are already looking for the reason and solving the problems you encounter. In order to solve your problems better and faster, Please add my skype. I need a more real-time communication tool to help me solve it quickly and efficiently.
skype account:
live:9e195c656ef41274