My safety switch is disabled and it doesn’t happen at immediate power of the quad…while turn on its normal only but if I kept sometime ideal it’s start beeping.
If again I gave motor test it’s normal.
My safety switch is disabled and it doesn’t happen at immediate power of the quad…while turn on its normal only but if I kept sometime ideal it’s start beeping.
If again I gave motor test it’s normal.
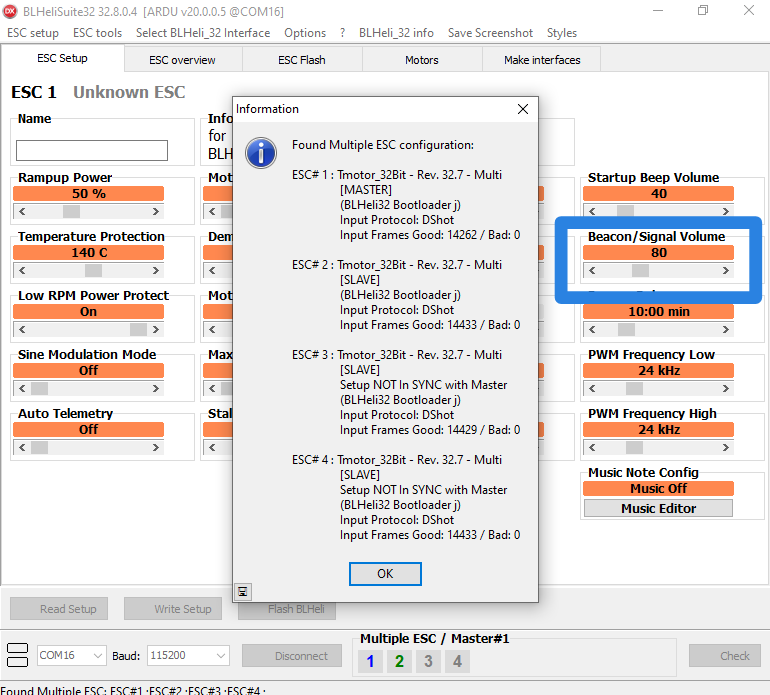
If there’s no activity for 600 seconds, 10 mins by default, the “Beacon” starts
Beacon_Delay=600
Change it in the BLHELI Suite settings if it’s an issue for you
So it won’t create any problem if esc keep in active …and current scenario is normal only.if keep flying the model it will not go in to delay conditions.
Thank you .
Disable the feature if you don’t like it. I have craft often running on the bench and it’s annoying so I turn the beacon off on all.
Yes. Drag it to the left to disable.
Sure thank you dave.
Hi Dave,
I followed you lead and set up an Arduino Nano to interface with BLHELI ESC’s, thanks for the push.
I was running out of spare flight controllers to play with.
It works all the time and Everytime. Glad I was able to help you out
Hi Dave, I have the same problem. I bought the cuav v5 Nano.
I installed stable version 4.07 from ardupilot. Since the blheli suite program does not see the escs, I flashed the escs with omnibus f4.
I calibrated the esc one by one from the RC controller. but the motors spin at different speeds. My esc supports oneshot, oneshot125, dshot150, dshot300 and dshot600.
I tried all the protocols from ardupilot but the motors are not running synchronously at all.
esc:fvt little bee spring 30A
Motors: emax rs2306 2750 kv gps:cuav neo 3 pro
what do you think i can do?
Hello,
I have an Octo with CUAV_V7 and Hexa with Nora.
All ESC are Oneshot125 capable (not BLHeli). I used an Octo BLHeli compatible card to configure my ESC with Low set at 1000 and High set at 2000. My arducopter MOT MIN and MAX are also set to 1000 and 2000 with Oneshot125.
For school project, I have a V5 Nano with 4 old PWM Esc. MOT Min and MAX are also set at 1000 and 2000 with normal PWM. Calibration with arducopter 4.0.7 went fine.
If using dShot protocol (with special output mapping) you do not need to calibrate your ESC (set at 1000-2000 range when doing dShot configuration). If using normal PWM or Oneshot125, you may need to redo the calibration with arducopter. (remember it is not the same output mapping).
You can adjust minimum RPM if needed.
Marc
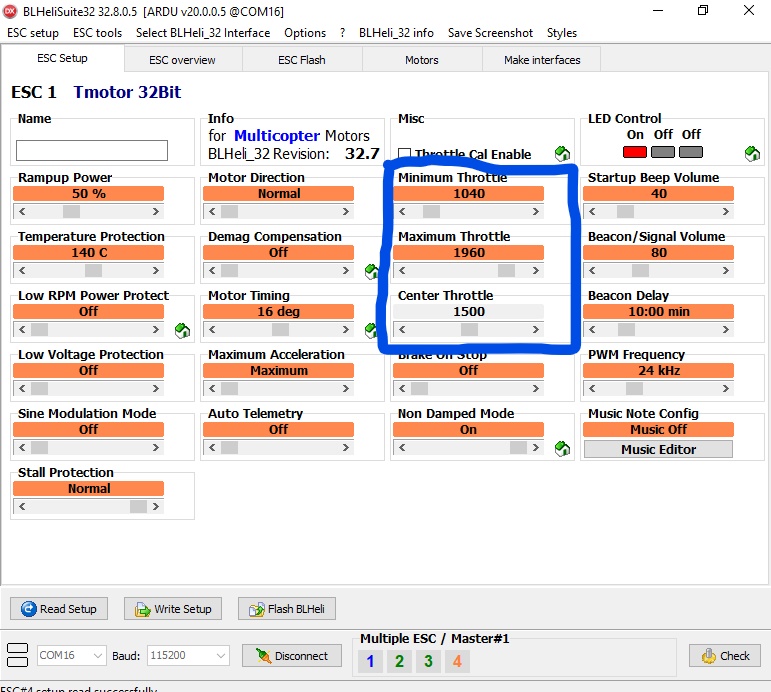
i have configured T.Motor BLHeli 32 input Dshot600 as below and Blheli suite confired pwm range as shown in picture below.
but when read via mission planner PWM output mapping it shows minimum as 1000 and center also 1000 as below. Its normal for Dshot 600 configuration?
dshot range is always 1000-2000
center also 1000 doesn’t not problem?
Hı Mark. thanks for your answer. I chose oneshot125 in mission planner (I think cuav v5 nano doesn’t have dshot support). I cut the power and brought the throttle of the controller to the maximum. I made all the power connections, then when I switched to calibration mode, I cut the power and reconnected it. beeps sounded. I lowered the throttle to minimum and with beeps the calibration is complete. When I gave light gas, the engines worked perfectly. but when i disconnected the power and reconnected, the calibration was lost again. I tried several times but always got the same result. esc: little bee spring 30A
The CUAV definitely does DSHOT, and all those other oneshot and multishot things are just like modified PWM. So the only real, sensible choices are
PWM if you cant possibly use DSHOT
DSHOT since it is a serial digital protocol with checksum, error checking and inherent noise immunity.
thanks. The problem is that although I also selected the dshot protocol, the motors spin at different speeds. I also adjusted the remote trim settings. I also did min-max speeds of 1000-2000. At first, the motors work synchronously for about 5 seconds, then each starts to rotate at a different speed. I said it is trying to balance itself because there is no propeller. I put the propellers on and tried to fly. The drone somersaulted before it took off. by the way i tried all protocols including pwm. same result
Post your parameter file. This is not likely to have anything to do with the ESC protocol. Those are BLHeli_S ESC’s anyway so passthrough isn’t going to work with the firmware on them.
Did you run Motor Test in Mission Planner to confirm correct motor order and direction? 90% of the time this is why a new craft flips.