I open this blog item to share experience about CUAV Core X7 and NORA. If relevant information come in the arducopter forum, I will add them to the blog.
First flight was fine after checking Y6 motor configuration. Selecting Y6 and X configuration from mission planner tool gave me an Y6A (my motors were set for Y6B). Change was made before takeoff.
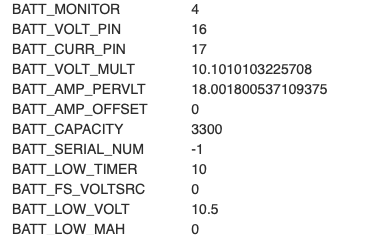
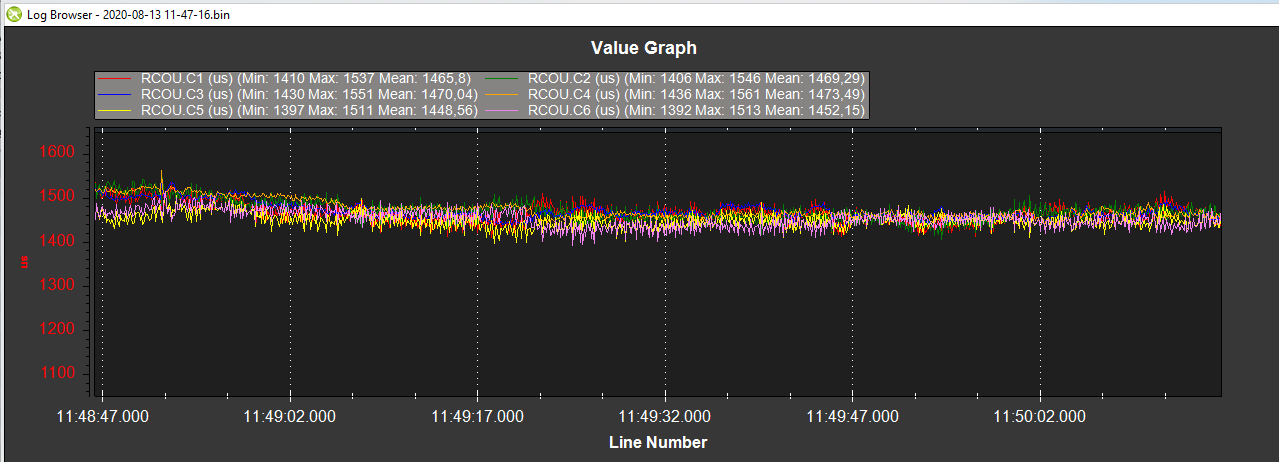
Voltage and current information was missing from the log. Looking at factory log, I discovered new settings.
Battery volt and current pins are 16 and 17 (0 and 1 on V5+)
I never owned one, are those cable sockets are proprietary or jst-gh? and behind the question, if all your current plugs are connected to a cube, do I need to redo all?
This may be a good thread to keep an eye on. @mlebret commented on my thread from earlier. I have two Nora’s I’m currently working with and have discovered one issue posted below:
The Nora and the X7 are essentially the same just different shape. the X7 Pro is also similar but has a much higher end Analog Systems IMU.
If I notice anything else along the way I will post my findings here as well. I have one Nora up and running on an old 3DR X8 platform, its configured with:
Copter 4.0.4 BETA (I noticed CUAV claims Copter 4.0.3 as fist supported version but this is incorrect.)
CUAV NEO V2 Pro
PX4Flow using Garmin V3
Two additional Garmin V3 Lidars for Simple Object Avoidance
I’ve jumped between Flow and GPS with good results.
I also have the Here+ RTK GPS and will be experimenting with it next.
I purchased the X7 pro as soon as it was released. I have not actually managed to find the time to get it in the air, I keep encountering little problems (Not to do with the controller). Maybe this weekend weather dependant.
I didn’t realize CUAV had a Nora event going on, I hope more people see/ use these autopilots as they are some of the best built/performing. They remind me of the A3 from DJI but running Arducopter
A few configuration tips:
The battery monitor had to be plugged into (POWER C)
Monitor Type - UAVCAN
Sensor - CUAV HV PM
This was the quickest way to set it up and works like a charm.
Also, GPS_TYPE: 9 UAVCAN
Auto configure did not work for me.
I just got in both my Nora and my X7 cube. Unfortunately I am in the middle of a move so it will be a couple a week’s before I take my Tarot 810 and fit the Nora up to it.
I will be using it with the CUAV CAN PMU as well as their Telelink
External compass (IST8310 from GPS module) is now working and used as primary. I had to reset parameters by uploading new firmware (4.0.4 rc3) to identify external compass.
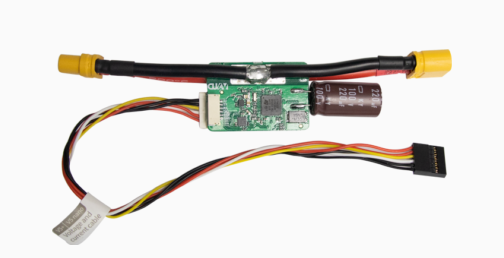
Here is an alert for X7-X7Pro-Nora users with CAN PMU.
If battery voltage drop below 9,5V, easy with a 3S battery, possible with a 4S lazy one, PMU can stop powering Nora or your X7. I had three occurrences with my Nora configuration and I reproduced the drop at home with a Lab power source.
It could be a bad PMU but it is better to check your units and report result (good or bad) to CUAV.
I have attempted to, but have been unsuccessful. I have the Here+ RTK and getting the Here GPS connected with the JST GH connectors are incompatible and I haven’t received the proper size to re-pin it. The Pro GPS that CUAV makes works extremely well and the I have found the built in compass is rock solid, even next to metal objects.
Hi @crazy1pilot, so basically you were unsuccessful for lack of the right cables, not for problems of integration? i.e you haven’t reached parameters problems and such, right?
So I can still have the hope of saving on that?
Gal