The C-RTK 9P is a high-precision RTK module designed by CUAV based on the Ublox F9P module.
I happened to see Andrew Tridgell’s test article on F9P by chance. I wanted to test C-RTK 9P., With the help of Andrew Tridgell, I learned how to use log and MAVProxy for data analysis. Thanks to @Andrew Tridgell !
My test data:
Test Equipment:
- C-RTK 9P 2(One as Base and one as Rover)
- CUAV V5 plus FC 1
- Multi-frequency antenna 2
- PC 1
Test locationt
This is the place I tested, and there are buildings around it.
base station

I used a C-RTK 9P as the base station. It completed the base station configuration in one minute. According to my experience, its satellite signal receiving capability is much higher than that of the M8P module.
Rover test
RTK fix
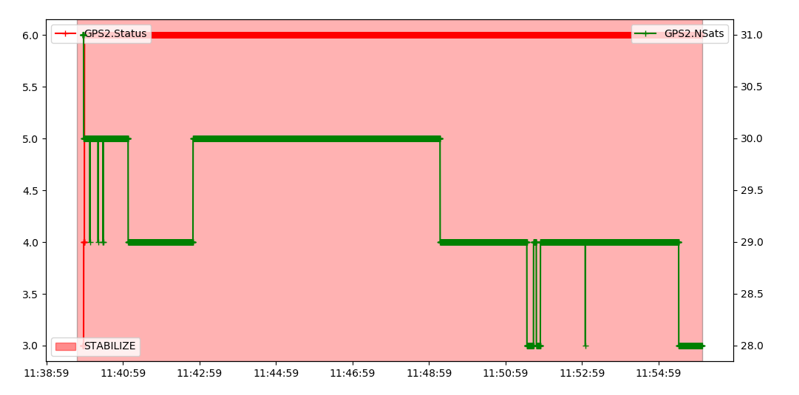
It easily enters the RTK fix state and keeps it. I tested the M8P module multiple times in the same place, and it was very difficult to get into the RTK fix, it just kept the RTK float state. So I think it is better than the M8P.
Horizontal accuracy:
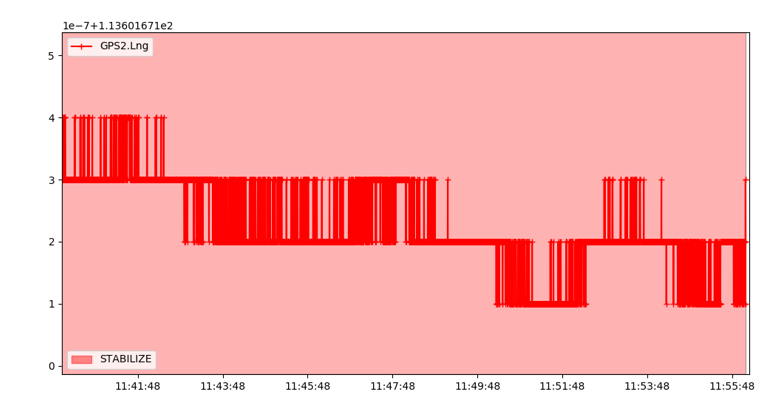
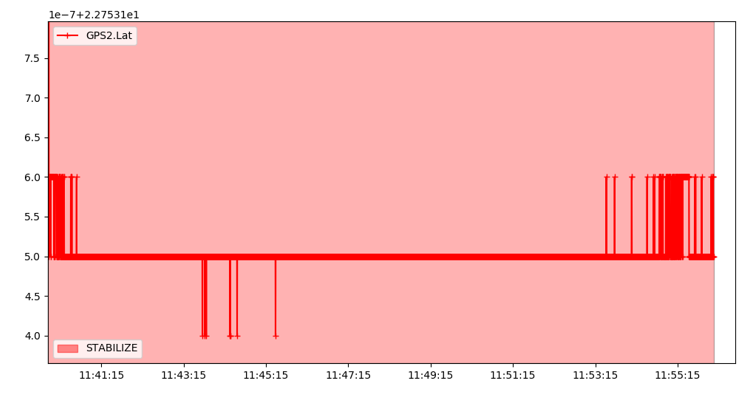
As you can see from the two figures above:
The longitude fluctuates between 113.6016711~113.6016714, and the latitude fluctuates between 22.7531004~22.7531006, and the position accuracy is about 2cm.
Alt accuracy:
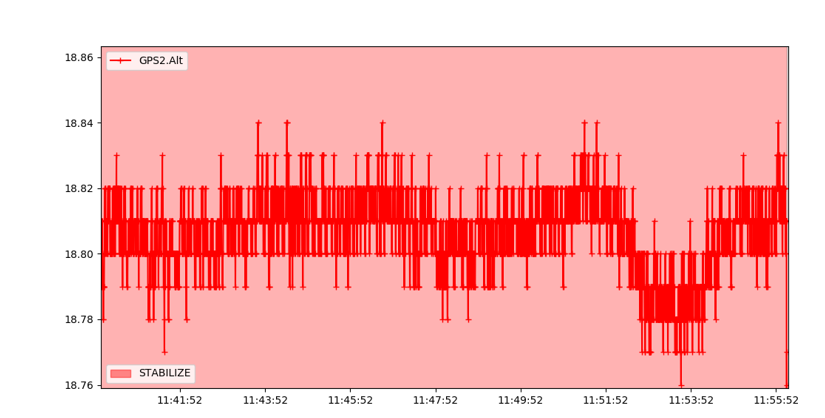
Alt accuracy is 2CM
Speed accuracy
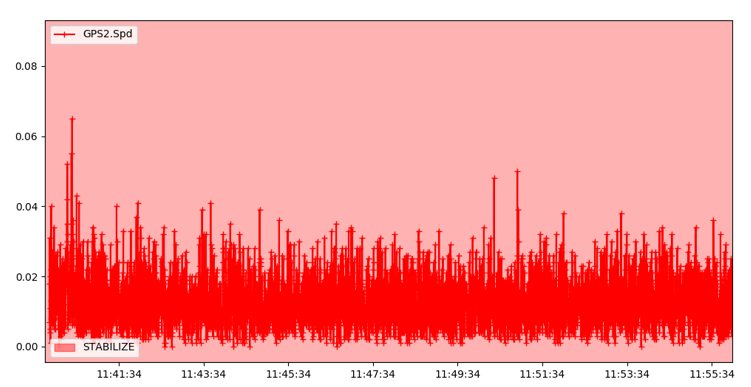
This is the horizontal speed accuracy。
GPS Reported Accuracy
GPS Reported Accuracy affects the mixing ratio of GPS in the EKF, which affects the flight of the drone.
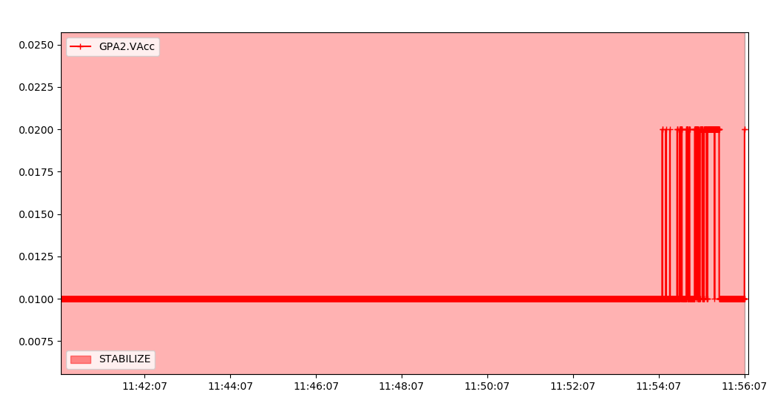
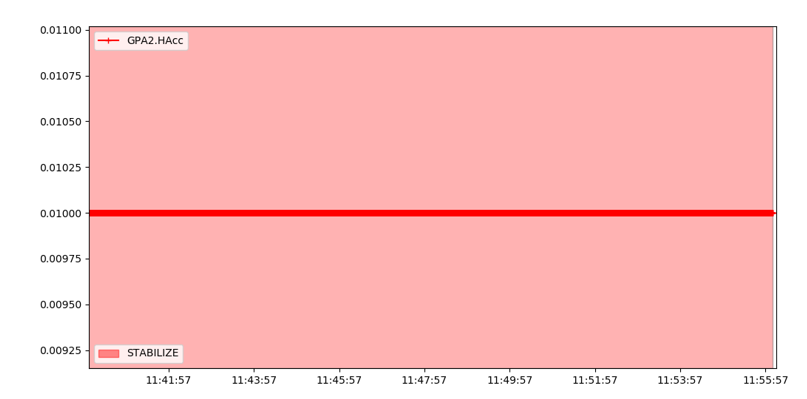
This is my test data, the horizontal report accuracy is 2CM, and the Alt report accuracy is 1CM. It is better than the test data of Andrew Tridgell , because it is always in the RTK fix state.
Speed Accuracy
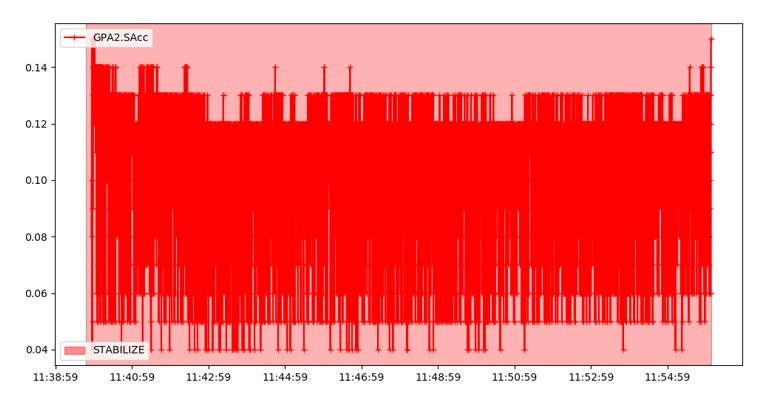
This is speed report accuracy, it may not be as good as other data.
Above is all my test data, more professional test articles, please see Andrew Tridgell’s article:Comparing a uBlox F9P with a M8P with RTK.
for C-RTK 9P:http://ardupilot.org/copter/docs/common-cuav-c-rtk-9p-gps.html
CUAV docs:http://doc.cuav.net/gps/c-rtk/en/