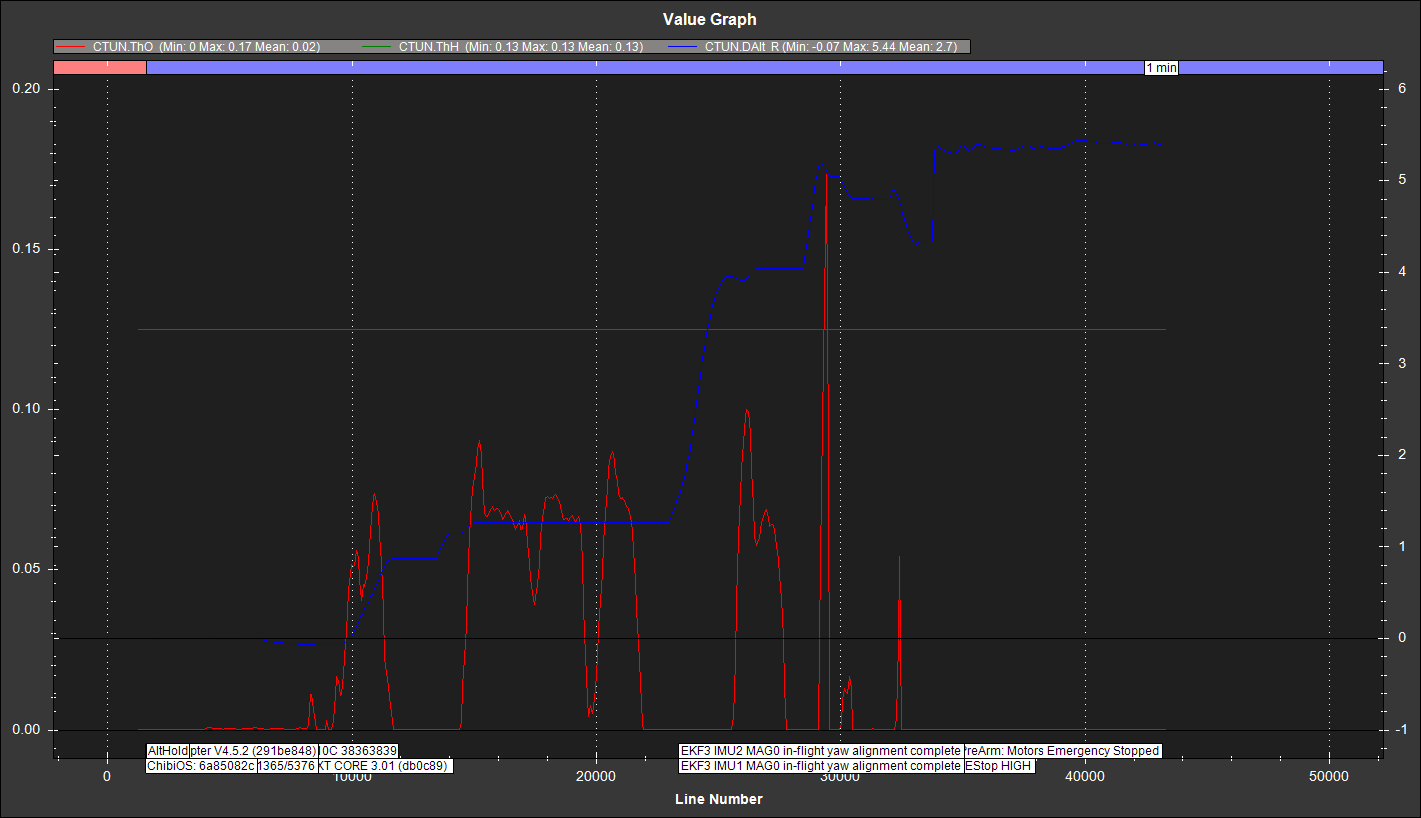
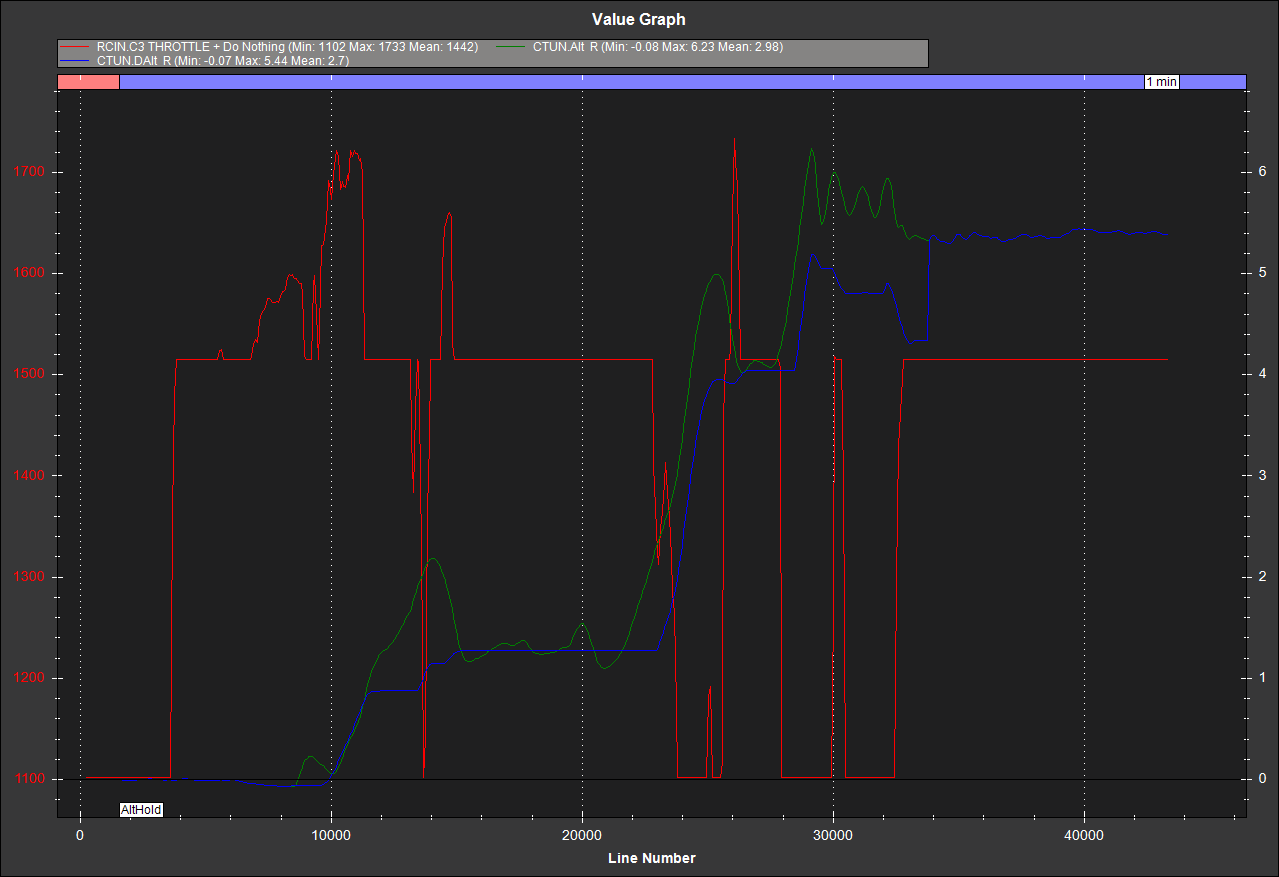
What could be the cause that the thrust hover learn did not kick in and the CTUN.ThO goes to zero? Mid-throttle, the drone is still climbing.
While Alt Hold is rarely a problem unless the aircraft has a very low hover throttle. Have I stepped into this territory?
MOT_HOVER_LEARN is set to 2.
MOT_THST_HOVER, 0.125
Arducopter 4.5.2, 4S Hexacopter with CubeOrange
Herelink RC, Alt-hold flight mode
Racestar 2216 KV1400 Motor + 0945 propeller
Previous Skywalker 50A ESC and calibrated and using the factory settings.
The vibrations are well within the limit before the drone crashes into the cage enclosure ceiling net.
The Harmonic Notch filter is enabled and noise is low.
log file