During testing of my oktopter after setting the throttle notch filter I noticed that during flying circles with front of the copter set to the center of the circle I get critical messages by mavlink:
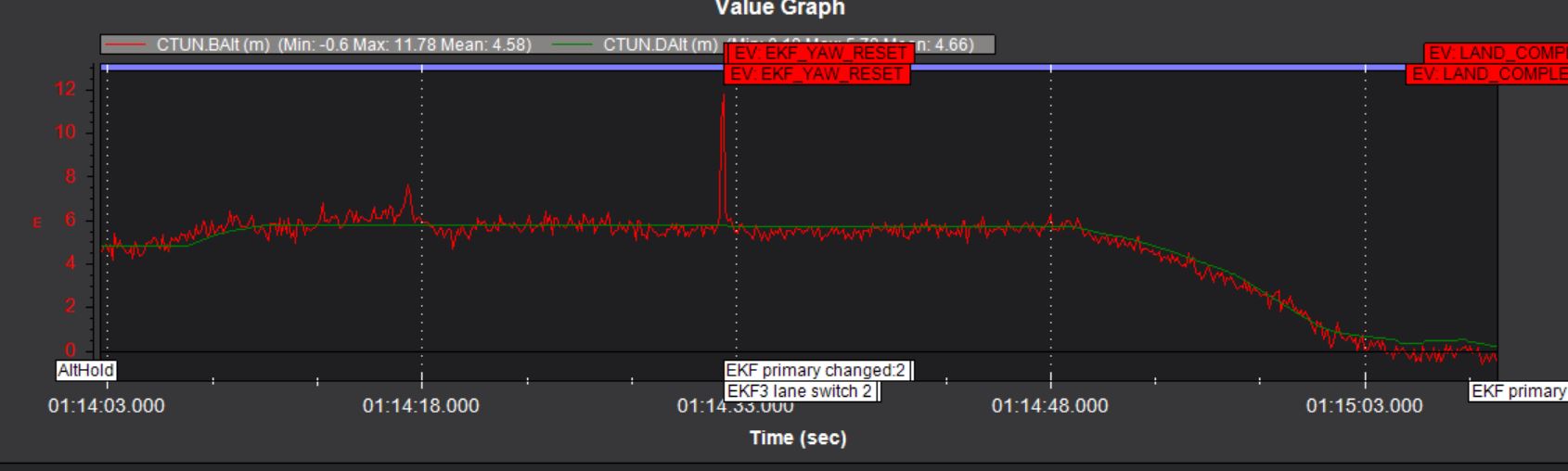
CRT EKF3 lane switch 2
WRN EKF primary changed 2
CRT EKF3 lane switch 1
Error pos vert variance
etc…
Generally that copter fly ok only during making circles that problem occurs. It appears in ALT-Hold and in Loiter but in Loiter after that messages bigger vibration occurs.
I changed BARO_PRIMARY to 1 and updated HERE2 GPS to CAN BUS and now copter fly ok without any errors but it looks like I have faulty BARO with baro glitches from time to time log from today
Is there possibility to completely disable selected Baro ?
Today I tested the same Cube Black with GPS ONE and the problem occur again. I don’t see Baro glitch in the logs. What can be the cause of lane switch 2,1,0 ? the log here second log
In different flight I triggered the problem when I started to climb rapidly. After message lane switch copter is vibrating more in loiter.
As I wrote earlier I can’t enable baro in Here 2 on CAN bus. I didn’t found the solution. Maybe that’s a problem with my Here 2 unit maybe with all Here 2. Now I am using second baro sensor which is located in Cube Black. I also checked that during fast flight wind can reach to baro sensor in Cube Black by USB micro connector so It’s good to cover whole Cube from the wind or cover only whole with USB and SD card.