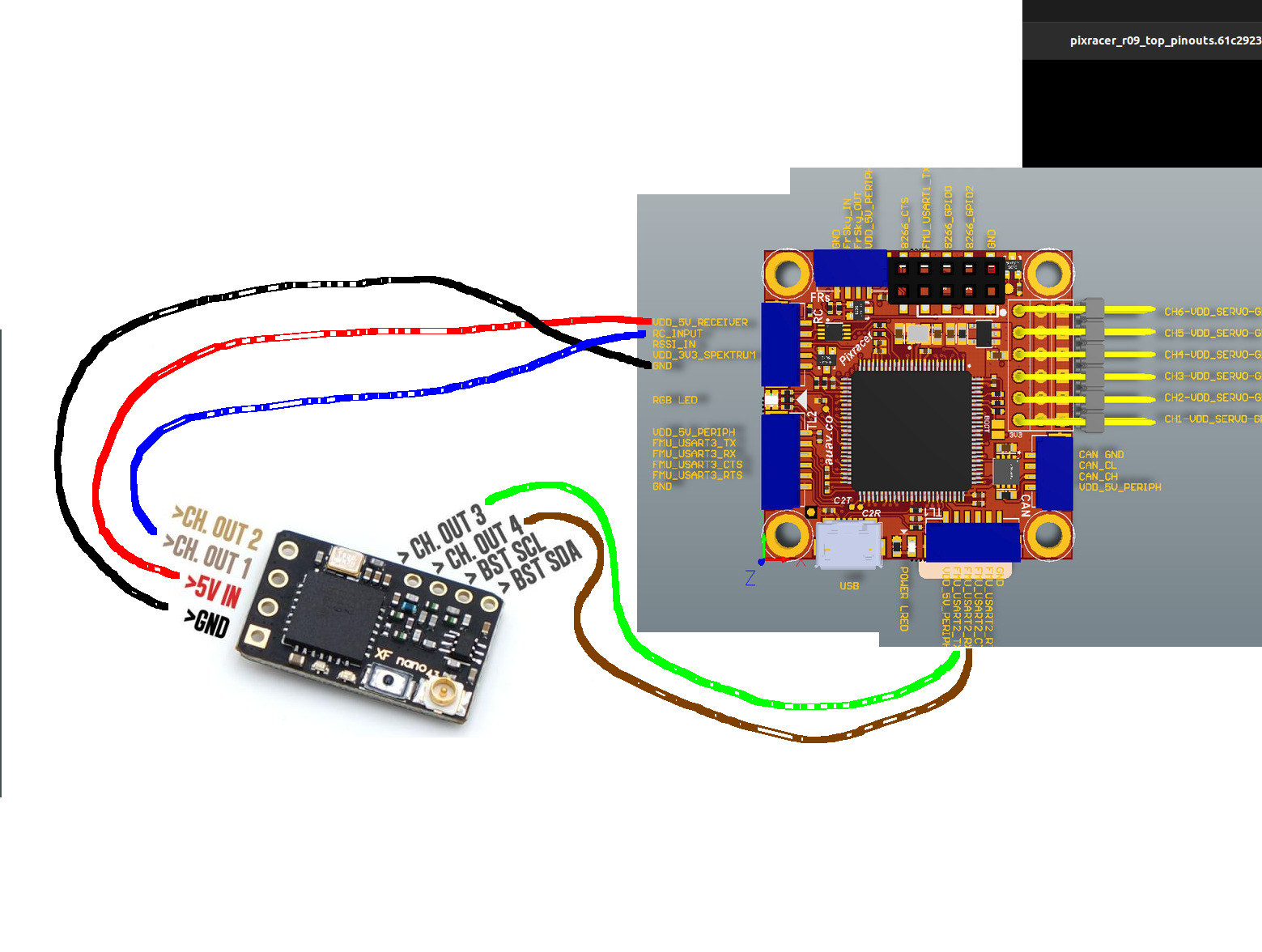
|UART1 |/dev/ttyS0 |WiFi (ESP8266)||—|—|—|
|USART2 |/dev/ttyS1 |TELEM1 (flow control)| → this should be the right one?
|USART3 |/dev/ttyS2 |TELEM2 (flow control)|
Transmitter Settings:
CROSSFIRE OP Mode: normal
WiFi: active
Receiver settings:
CROSSFIRE RF Profile: dynamic
Telemetry: active
RC by MAVLink
hear horrible things like lags and so on, maybe stick with SBUS as its proven?
cant get it to work, is there anything i missed ?
Thank you!
i got it working over TCP with nano rx set to MAVLINK tx/rx and serial set to mavlink2
if i activate “rc over mavlink” also rc works, but sloppy.
with CRFS settings (and serial to RCIN) RC works, and i can also see the ardupilot 4.1 in my tango but cant connect via wifi. mission planner will always show “connection error” as i would connect to a wrong comport.
Yes. That is what i was trying to say in the other thread. It feels like the data is not making it to the yaapu script, while it is making it to the radio. But to make things more odd - the Rqly:RF mode IS working within the yaapu script, but nothing else seems to show data. batt voltage shows 0.00, alt shows 0.0, no movement on artificial horizon.
we dont need to hijack another thread, and this is slightly off topic. I think the OP is talking about full MAVlink telemetry, maybe for a ground station?
yes i have no idea what yaapu Telem passthrough is sorry .
i just want mavlink telemetry with mission planner.
for me it seems that is not possible over the CRSF protocoll and the serial set to “rcin”. please correct if this is wrong
serial set to mavlink and my nano rx too + SBUS seems the best option for now.