I have done 2 flights on my plane using the receiver I bought, and there were no issues. On the 3rd flight after takeoff about 200 meters away, I lost the bind with my radio. Luckily the plane triggered RTL, and after loitering for long time landed without scratch. After checking all the electrical connections which were intact, I concluded that the Rx-Nano had lost bind. I re-bind the Rx and it start to work again.
This really looks like a hardware issue to me. You mentioned the light on the RX went red, so it’s not connected to the radio at that point. I looked in the log to see if there had been any power fluctuations but I didn’t see anything. As far as I can tell, Ardupilot and the FC worked just fine.
I’ve never had a TBS RX lose it’s bind. I’ve had failsafes. I’ve had an RX that I couldn’t bind and ended up having it replaced. But once bound, they’ve always been stuck like glue for me. This is a new one to me.
I would completely understand you’ll be on edge to fly that plane again. You might want to look up auto-landing and DO_LAND_START that way should the plane RTL it will land on it’s own without loitering for 30 minutes and destroying the battery.
If you get any answers back from TBS please share them here because I’m really curious what they have to say.
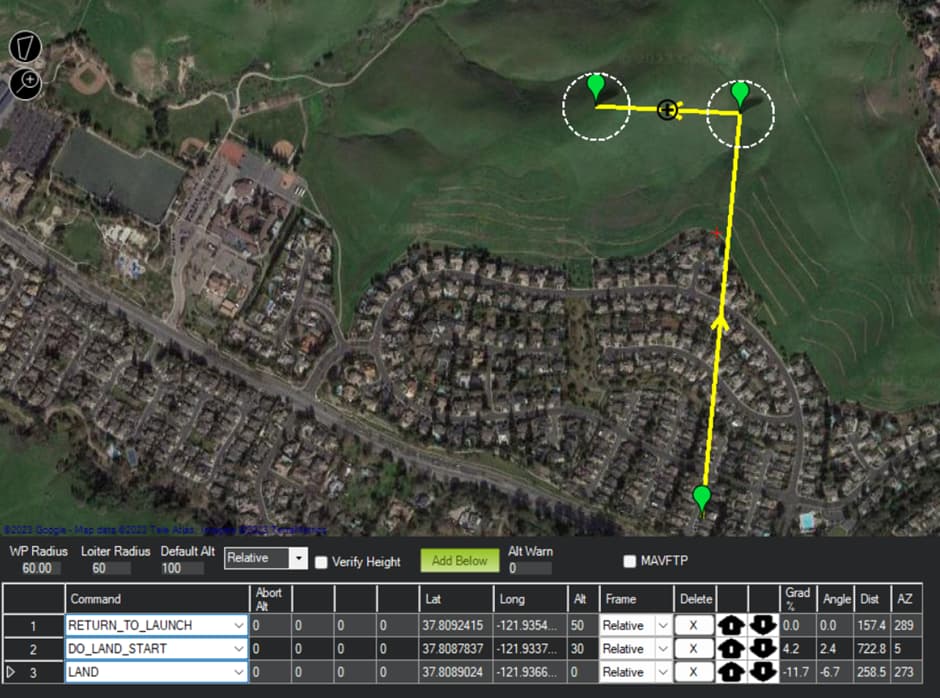
Go to Plan tab in MP and set the sequence as shown in the picture.
Expected behavior: Plane will return to arming location, and than autoland sequence will start towards the landing coordinates. Is this correct order?
Note: In the Mandatory Hardware “Failsafe” drop down there is no option “RTL_Autoland” so it has to be setup in the config tab.
Some other parameters to adjust based on your aircraft glide ratios:
Alt: e.g. 50 to 30 to zero
Land_flare_alt
Land_flare_sec
land_pf_alt
land_pf_sec
Land_flare_cd
Did I get this right?
Also, I am assuming that setting RTL_Autoland will wipe off any waypoint mission unless the two are combined from the get go?
Yes, the plane will return to the home/arming location (or rally point), then switch to auto at the “DO_LAND_START” command. In that mission you have on the screen shot, you probably want to add in a few waypoints to set up and approach. The “DO_LAND_START” is just a command, not a waypoint. So the location and alt information wont have any effect on the flight.
You can have a mission loaded in the plane, along with these landing commands. If the plane is following the mission it will just continue past the do_land_start and start the landing sequence. The other advantage to having this set up, is if you are doing auto/mission landings and if for any reason you have to abort the landing (go-around) the plane will go back to the do_land_start. Without that command, after a go-around, the plane will only go back to the one waypoint before the landing command. Depending on your location that could be exciting.
@Allister
Today I tested RTL_Autoland, and it worked. Unlike quadcopter, you have to plan a mission in order to land a plane after RTL. I don’t see it any otherway.
Here is the mission parameters:
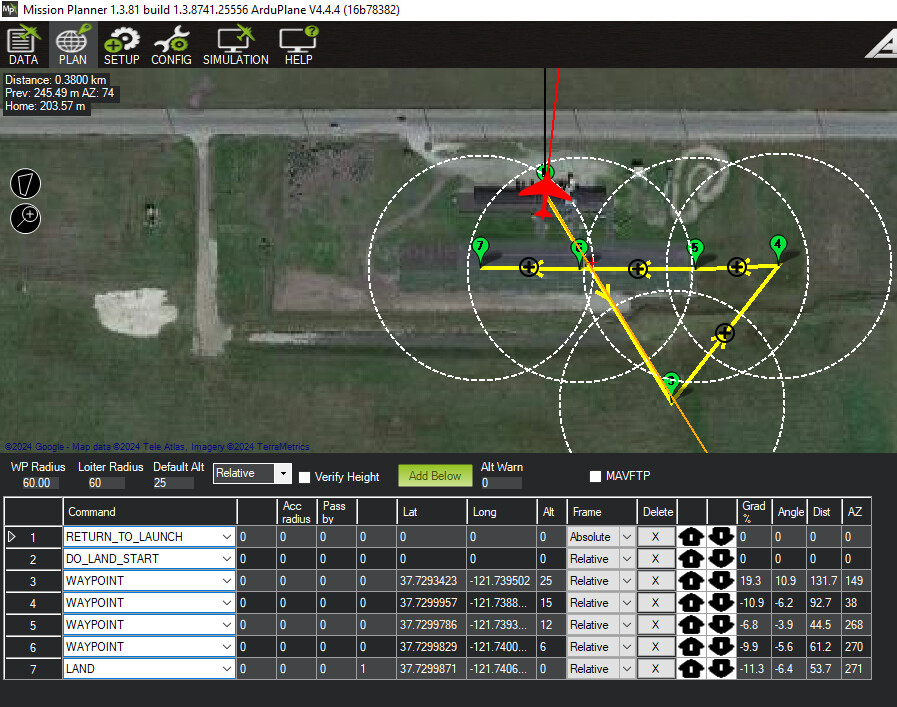
Yup. I guess if you’re in a really open area you could get away with maybe one waypoint and a land command, but for most of us a couple of waypoints are needed.
I noticed in the screen shot you have a RTL command. That isn’t needed. Unless you want that for any inadvertent switch to auto mode, and even as I write this I don’t think it would be needed. If you’re just using this for RTL mode then you can just start with DO_LAND_START.
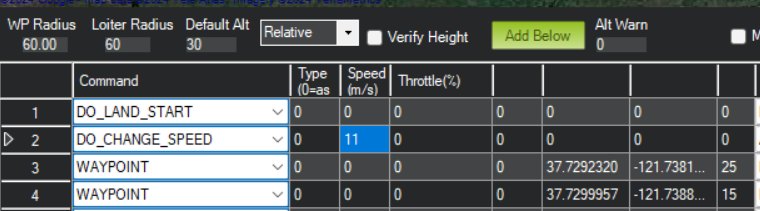
I am reviewing the flight data and the video, it seems that with strong head wind I should use Do_change_speed to 10m/s (flight log shows mean at 6.6m/s). So after Do_land_start I am adding Do_change_speed. But in the documents there is no mention of “Throttle%”.
What does it do? and do I need to adjust this as well in my scenario? There is no speed sensor on my plane.
So a new RX nano fixed this? I guess you have seen my thread about endless loss of bind in flight problems?
The 2 nano RX that came in the kit are both doing this. A nano pro I bought separately seems to be ok. I have just raised a ticket with TBS. Also just found another RX nano, perhaps 3 come in the kit? Ill try it tomorrow.