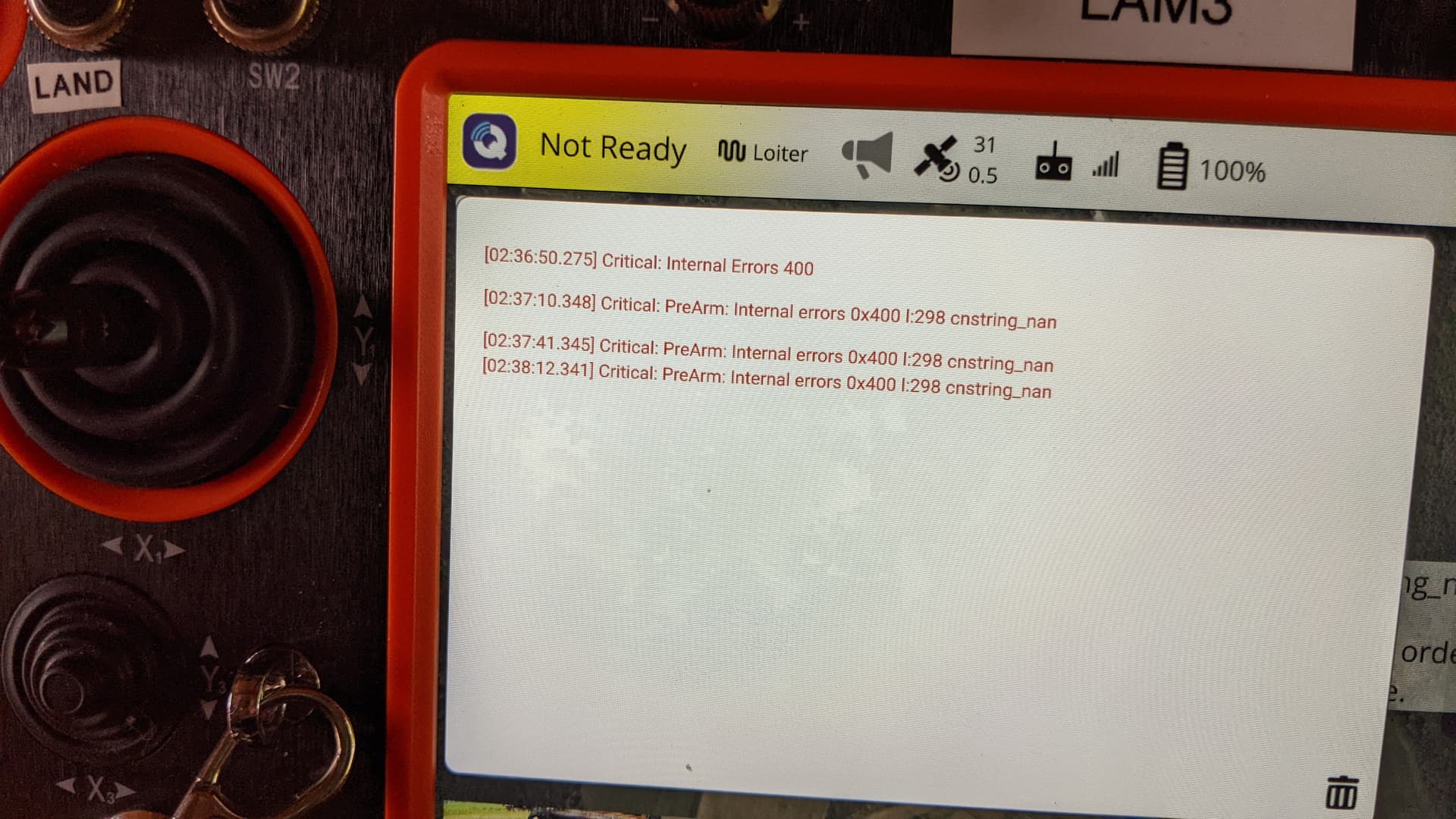
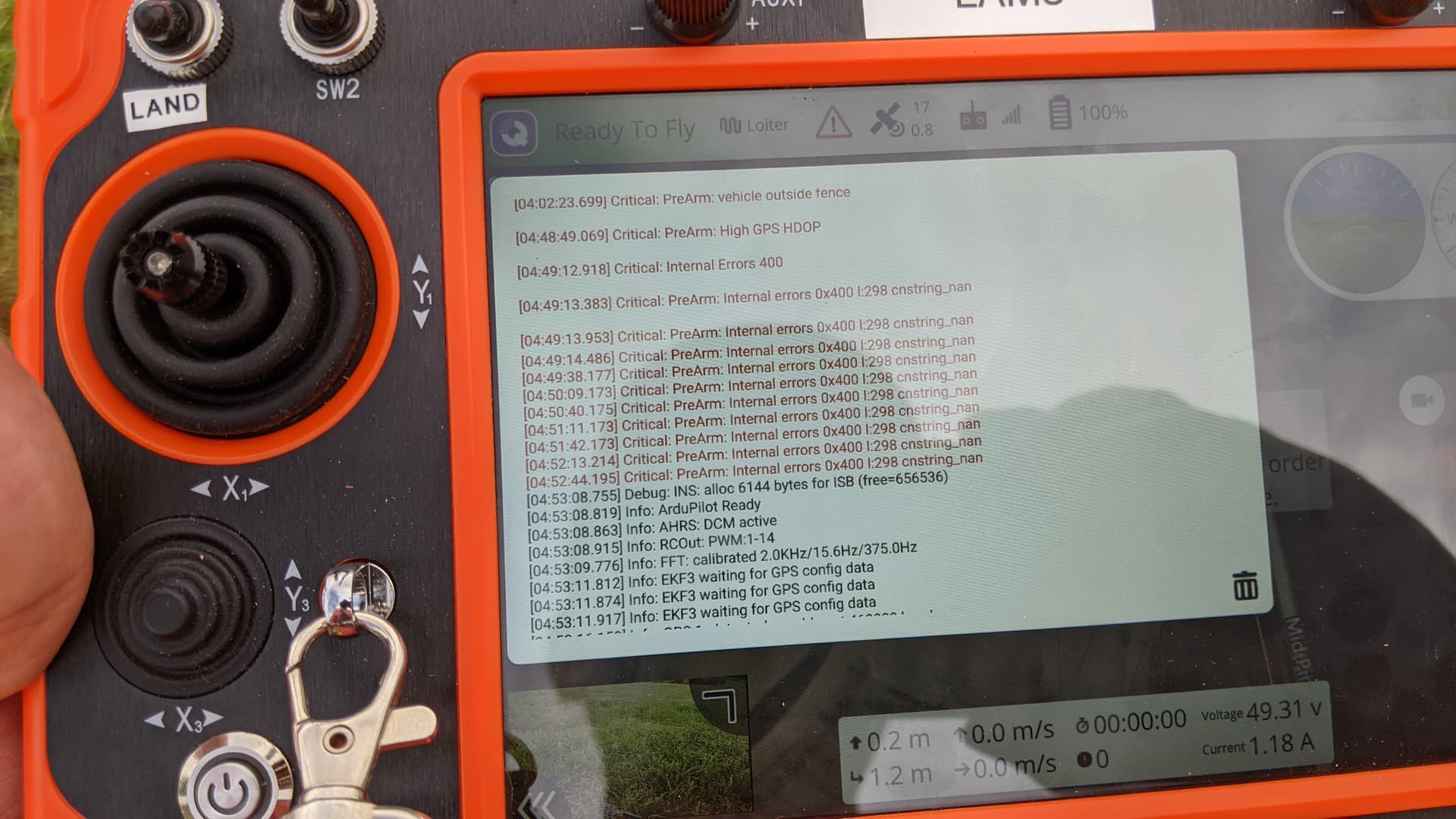
I got some weird error (see above) several times (three so far in two outings): the error seems to be triggered at random times (after 20-40 minutes of the copter being on the ground idle - not armed). Once it’s triggered, it repeats itself every 30 seconds until I reboot the autopilot. I left it for 20-30 minutes at some point, but it keeps repeating. So far it never happened in flight, so I’m not sure what happens if it occurres in flight: I didn’t dare to try take-off with the error on. A few details on the setup: the autopilot is an orange cube, setup with a SkyDroid controller, and a differential GPS setup (with two ublox zed-f9p for yaw computation as the primary source for yaw). We also use RTK corrections from an ntrip server (emlid) where we feed the corrections from our RTK base. The firmware is 4.3.6. There are possibly other relevant details for the drone, but they may be red herrings (or just contributing). This is our third large bird we built and the first two don’t have the problem: the details above (controller, differential GPS, 4.3.6) are what I believe to be the difference between the third and the other two. If it matters, the birds are “big” (for us): 6 x 23" propellers with 15kg AUW (5kg of 3Ah 12s batteries).
So far this has been just “annoying” and “time wasting”, but I really don’t know what happens if this occurs in flight. Any hints on the cause (and even better solution) of the problem are highly appreciated.
Thanks,
Mihai