I really like this concept of reversing grid mission. As something which would be difficult for a human to do it’s just software for a robot.
One caveat though; make sure the mower is truly capable of sustained reverse cutting. For example my scag mower has a driveshaft which drives the mower deck through a gearbox. During normal forward cutting the grass is lower than the shaft and gearbox because it has already been cut. In reverse however it’s presented with high grass which could potentially wrap around the driveshaft and cut into the seals. I’m going to try to affix some kind of shroud to alleviate this on mine.
1 Like
I got a weird error today that knocked out my rtk in Mission Planner while preparing a grid. RTK/GPS Inject set-up screen showed “Configuration of fixed position on Septentrio receiver failed.” And it kept showing up. I use an F9P base and a UM982 rover GPS. Any ideas how MP computes this, and how to disable it?

This may be a bug in Mission Planner. I haven’t noticed that it actually prevents RTCM3 transmission (though maybe while the window is open, it’s a problem…).
I usually don’t leave Mission Planner lingering on that tab after connecting the correction source (I go back to the Data page). Try that for now.
@Eosbandi may be able to provide a fix (or explain why it isn’t a bug and how to configure around it).
Yes, the Data page only shows GPS: 3D, and the rtk fixed never comes back. How does one ping @Eosbandi ?
The “@” does exactly that. He’s usually fairly responsive and very skilled with Mission Planner development.
The only case when this error comes up, if you clicked connect while the Septentrio was selected. Since configuration is a background process once it started it will run in the background and eventually fail.
I just did a beta update of MP, and it seems the bug is reproducible by connecting to an NTRIP source (no Septentrio device in use) and then navigating away from the SETUP page. Coming back to the SETUP page immediately displays the Septentrio error window, shows “Base” as red, and the satellite graph freezes. Ok’ing the error window seems to reset things without a need to reconnect, and everything greens up with a live graph again.
OK, this is a bug then… i’ll look into it.
2 Likes
Also happens if directly connected to a u-Blox GPS (I just so happened to have one next to me from some earlier dev).
1 Like
PR sent in…
1 Like
I encountered this issue as well. Glad to see it is a simple fix!
I ran the zigzag plan. I’m sold, it’s way quicker for our slow turning mower.
Now, how to automate the zigzag into our plans…
Please point me to the steps needed to download this patched version of MP?
Until the next beta release, you can get the interim build from here : https://github.com/ArduPilot/MissionPlanner/actions/runs/11621047690/artifacts/2131025412
1 Like
My little mower has been running zig-zags perfectly for the past week, but today (after changing a waypoint by a few cm) it runs to the last waypoint rather than the first. Along the dashed line, that is. I noticed that MP didn’t ask if the home position should be reset at the start of Auto Mode, and it looks right on the Plan map. I likely did something simple, but can’t seem to track it down. Any thoughts?
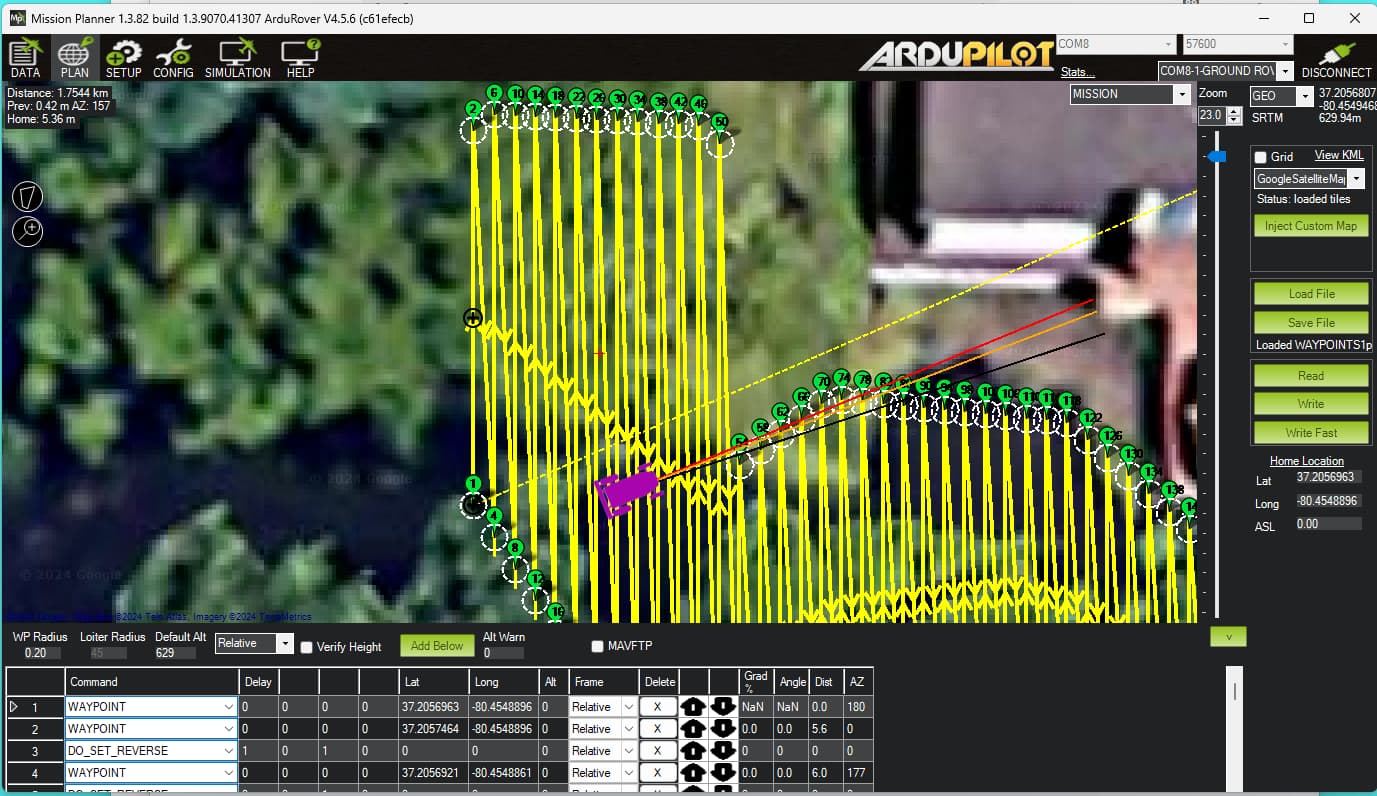
WAYPOINTS1pm7Nov.TXT (20.7 KB)
There’s nothing wrong with that file.
More likely, you had a waypoint selected that was not # 1.
The Rover will not normally navigate to the HOME point unless RTL is commanded (often a poor mode choice when obstacles are a factor - I find it generally useless for Rover applications). In other words, resetting HOME upon mission upload/edit is entirely optional and likely irrelevant.
1 Like
Hi there.
Great content herein, I know this is an old thread, but hoping to get pointed in the right direction from you more experienced members..
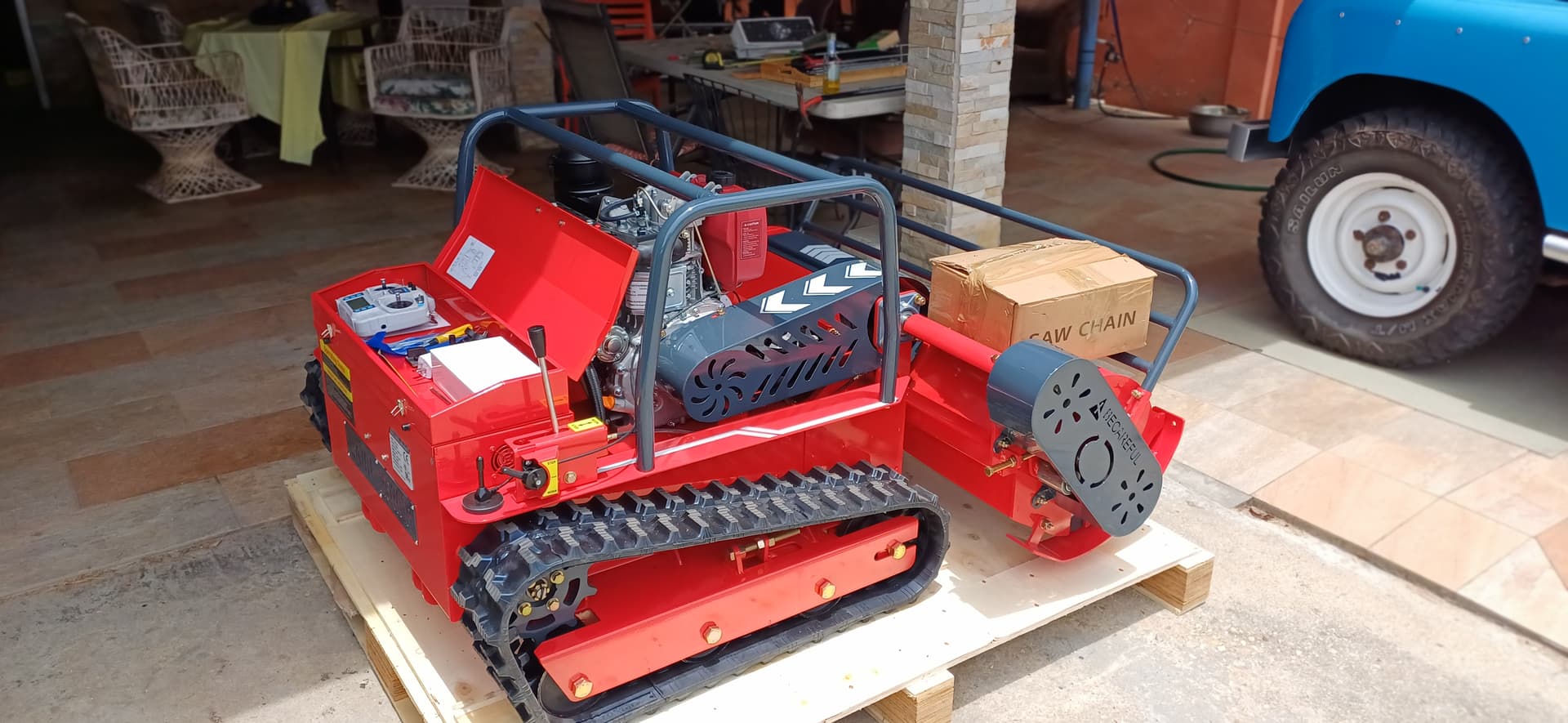
I’m working on developing an autonomous RTK GNSS system for our Flail Mower. We bought this for our RC Flying Field and it works great as an RC Mower/Flail Bushwhacker (“maiden flight” video attached).
Equipment Purchased for the project:
- SiK Telemetry Radio V3
- H-RTK NEO-F9P w/ Base Station Antenna
- H-RTK NEO-F9P w/ Vertical Array Patch Antenna
- Pixhawk 6C Mini
- Weatherproof enclosure
- Tripod
- Dell 7280 Laptop
- USB Hub
- 20ft USB Heavy Duty Extension
New to this forum, and trying to access as much info as possible, so looking forward to responses.
Thanks in advance, Cletus

Make a new topic. This has nothing to do with reversing during a mission.
1 Like