Dear all,
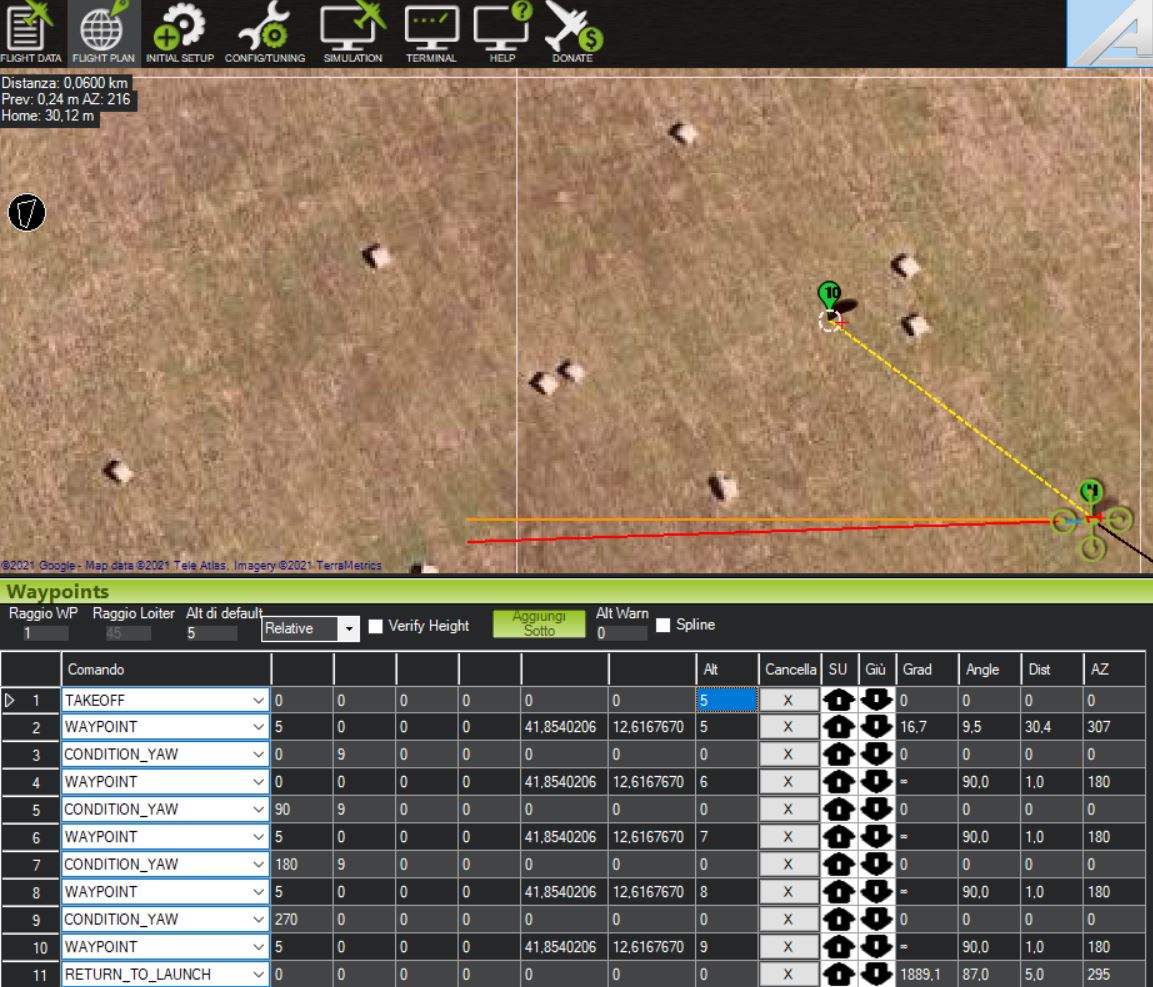
I would like to create an autonomus mission including a set of WP having the same latitude and longitude but different altitude, as a vertical survey. When I create these commands with mission planner, I see a lot of NaN or not finite values in the colums “Grad” of WP command. Is this dangerous for the autopilot ? How the drone will react ? Simulating the mission everything works fine, but I’m afraid the I will destroy my quadcopter  I attacched the MP screenshot.
I attacched the MP screenshot.
Please let me know if anyone has faced the NAN and infinite values during mission plan.
Thanks
check it with sitl/simulation.