ruicosta
February 10, 2020, 11:50pm
1
Pixhawk Hexacopter with copter 4.0.1 firmware installed.
On third flight it crashed. I was doing Autotune in stabilize mode. Than I lost control of it and it crashed. I think the voltage of the battery came down and the drone entered in battery safe mode. I can’t understand why it crashed. Can you please see the log and help to understand the cause?
Bin Log File
smartdave
February 11, 2020, 12:09am
2
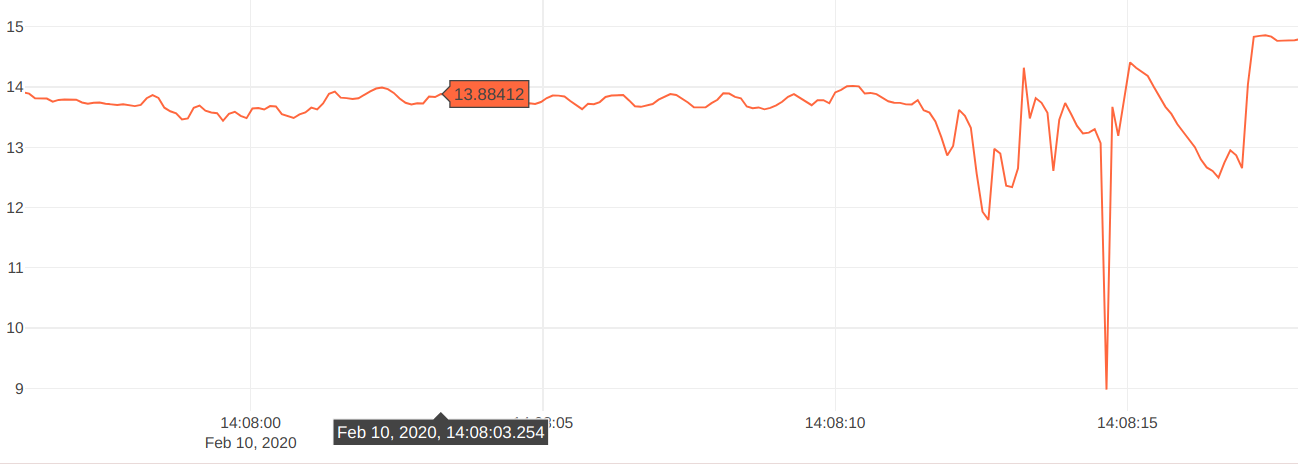
Looks like you had a battery issue
|14:07:58|6|1|BATTERY FAILSAFE: OCCURED OR FAILED TO INITILIASE|
Then right around the same time your battery dropped below 9V.
What Mah battery are you using?
Seems like the battery just could not take the load being put on it
You also have not set your max and min battery settings. Autotune uses these values.
|MOT_BAT_VOLT_MAX|0|
2 Likes
ruicosta
February 11, 2020, 9:53am
3
I think also the problem was the battery voltage that droped below 9V.
The battery I’m using is a Multistar 4S of 16000mAh 10C.
What do you think?
Maybe I will have to buy a better Lipo battery pack. Something with the quality of Tattu:
Do you know another EU shop with good battery packs?
smartdave
February 11, 2020, 5:57pm
4
The 16000 mAh is good. However the 10c might be an issue. How are you powering all your ESCs? What does you power distribution board look like?
ruicosta
February 11, 2020, 9:20pm
5
All ESCs are soldered all together directly to the wire to the battery connector. There is no problem there. I think the problem is the 10C.
Harald
February 11, 2020, 9:47pm
6
Teh best Lipos I have ever used, and I tried many, are: https://www.aliexpress.com/item/32889998861.html