I just tested my 600 helicopter today and it all went well in stabalise mode until it crash landed during alt hold.
The aim of today’s flight is to get closer to autonomous flight. The plan to get there involves flying stabalise, then althold, loiter and finally auto.
While testing today, the stabalise mode worked perfectly. When we switched to alt hold mode, it worked well most of the time until we started to descend with alt hold. The heli motor just stopped mid flight at around 30m altitude and dropped all the way down to the gound. It was a pretty bad crash.
The pilot notified us that during this crash, he had no controls over the helicopter. This includes motor throttle and also swashplate movement.
As we analysed the log data, we noticed that once we started descending in the ALT HOLD, there was an error of “potential trust loss” which is followed by “radio loss” and “compass loss”. We are not really sure what is the problem here.\
At first, we thought that it is a problem with traditional helicopter landing detection. But we are not 100% sure if this is the case.
I have attached the flight log in the link below.
We appreciate if anyone can kindly help guide us to what the problem may be.
Hi @jippers ,
it was a commanded shut-down due to setup error.
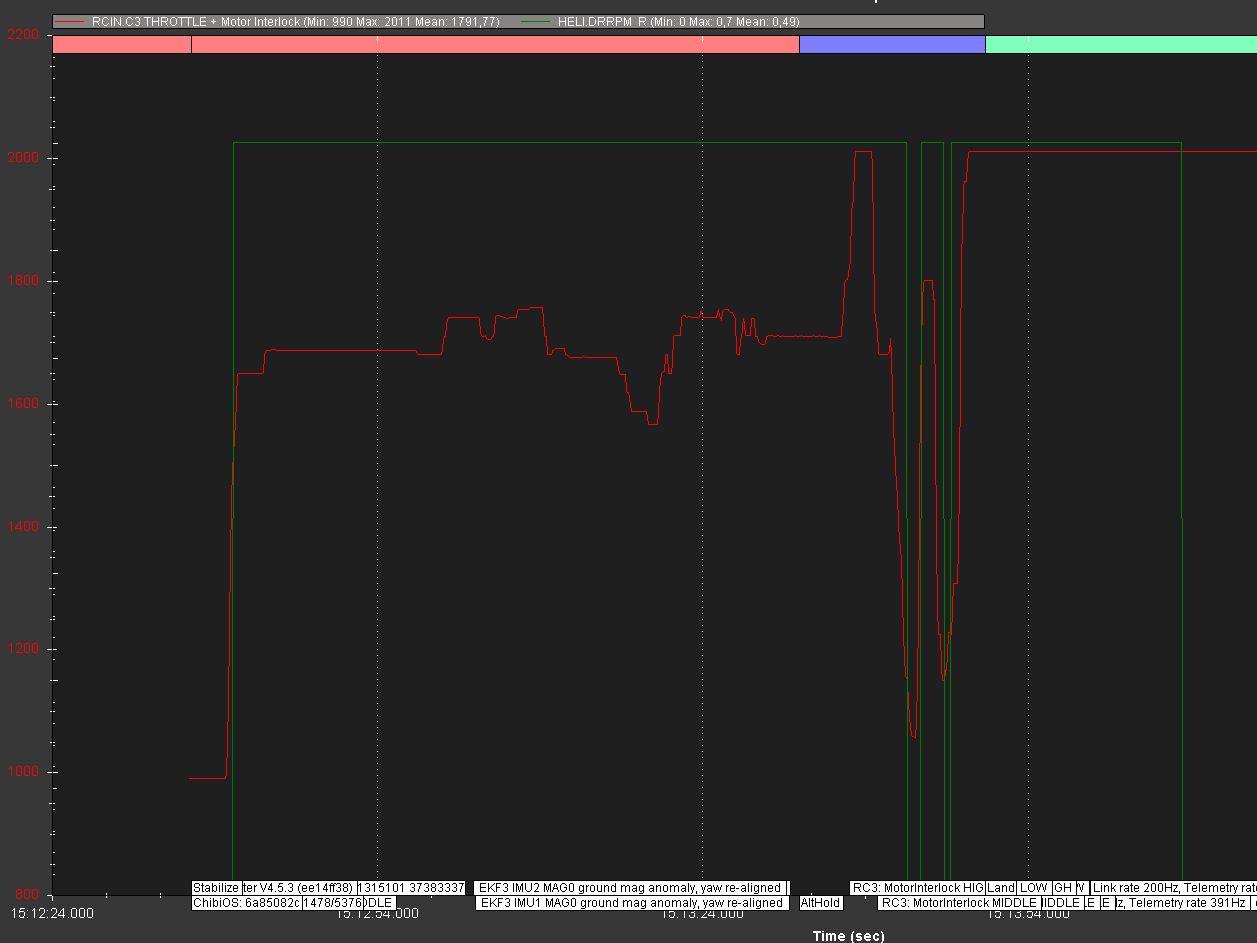
You have set motor interlock on channel 3 (throttle) while it should have been left at default on channel 8 (or any other channel associated to a 2 positions switch-surely not to a stick channel!).
As soon as the pilot lowered the collective (so channel 3) motor went off:
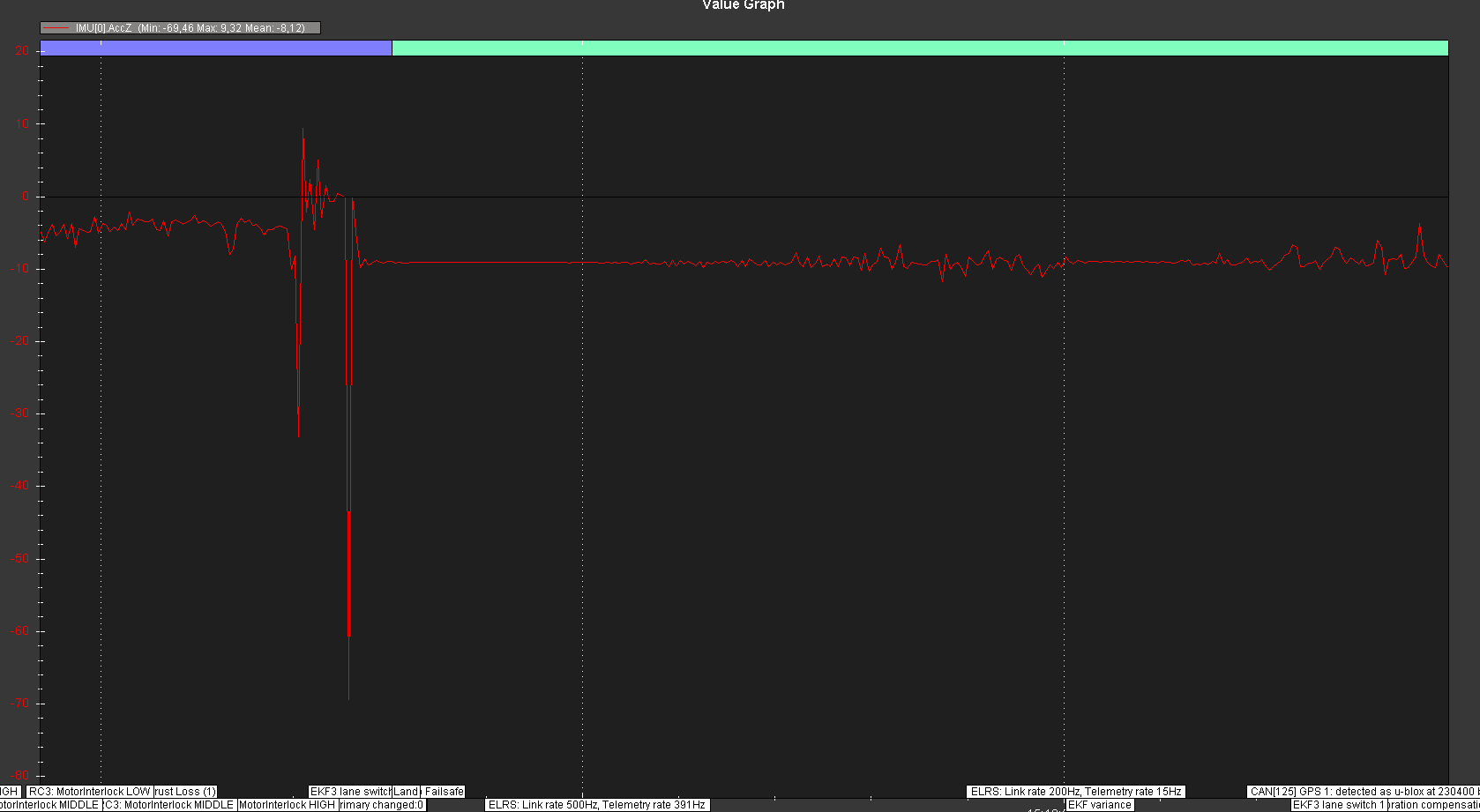
“Potential thrust loss” is a direct consequence of rpm dropping (and so lift) after motor shutdown and collective maxing out. The other messages are subsequent the impact:
Arm/disarm and motor interlock are unrelated to each other in what their functions are, arming switch (or procedure- by applying right yaw) performs several checks on internal status of flight control (like GNSS fix, compass health, params sanity and many others) before letting you arm the aircraft for takeoff and flying.
Motor interlock allows for switching on and off the engine, if flight control is in armed state.
So yes, it is an additional safety switch on “main” power source.
They are subsequent to each other, in other words you will not be allowed to switch motor interlock on if the helicopter is in disarmed state.
that’s not true, you need to bind it to a channel associated to specific RSC function. With 3 modes available (mode 2, mode 3-throttle curve, mode 4-governor), basically every possible ESC/engine configuration is properly covered by the code, It’s hard to believe you still need to use mode 1.
@jippers from what I can see in the setup, it looks correct. Please run a ground test with RSC mode 2 selected. Please set LOG_DISARMED to 1. Then arm and then enable motor interlock. I want to see if there are any errors or other issues are shown in the data
Ok. I just saw that your H_RSC_RAMP_TIME is 25 seconds. Please wait 30 sec before disabling motor interlock and disarming.
Then post the log.
Hi @jippers ,
in this log your arming switch (CH7) was low for the whole time.
Then you have motor interlock (CH8) reversed, I suggest to set back RC8_REVERSED to “0”. You can check in real time what is going on RC input and output in real time through MP radio calibration and servo setup pages.
You should test like this:
ensure switch ch8 is low
arm the aircraft using switch ch7
move ch8 switch to high and check for pwm rise on the servo output.
Why do you have the throttle up step? What are you actually doing for that step. The steps should all be done with collective down. Throttle is taken care of by the RSC
i will check this tommorow, for that step we just move the throttle stick up from zero, but i can check if its actually neccesary or if we were just tired and thought it is.