Had been flying the aircraft since the start of summer with no issues; airframe had approximately 15 or so flights.
This particular flight I went out, flew over a small lake and flipped RTL. RTL engaged without issue and the aircraft made its way back home. All was working fine and I had to adjust my goggles (DJI FPV Goggles V2), so I popped off the goggles, looked and saw the aircraft overheard. I noticed it seemed to be heading down at a steeper angle so I was putting on the goggles to check the OSD and flip into FBWA or Manual, but by that point it had hit the ground.
I have since powered everything on and checked that I still have fully operational control surfaces; I was checking to validating that the servos were functioning properly.
Anyone able to review the BIN file and help me to understand what went wrong? BIN File
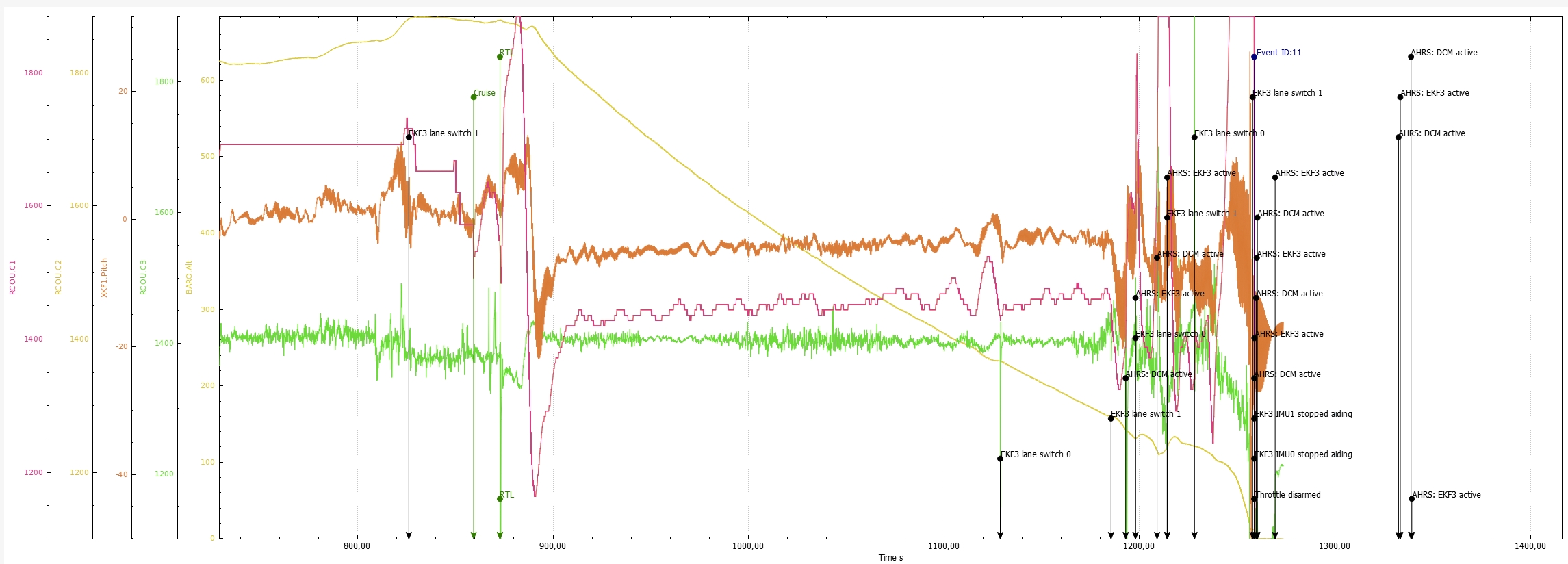
I’m not at all skilled enough to solve this, but maybe it would help to take a look at these pitch/throttle and EKF-related graphs/spikes which look odd:
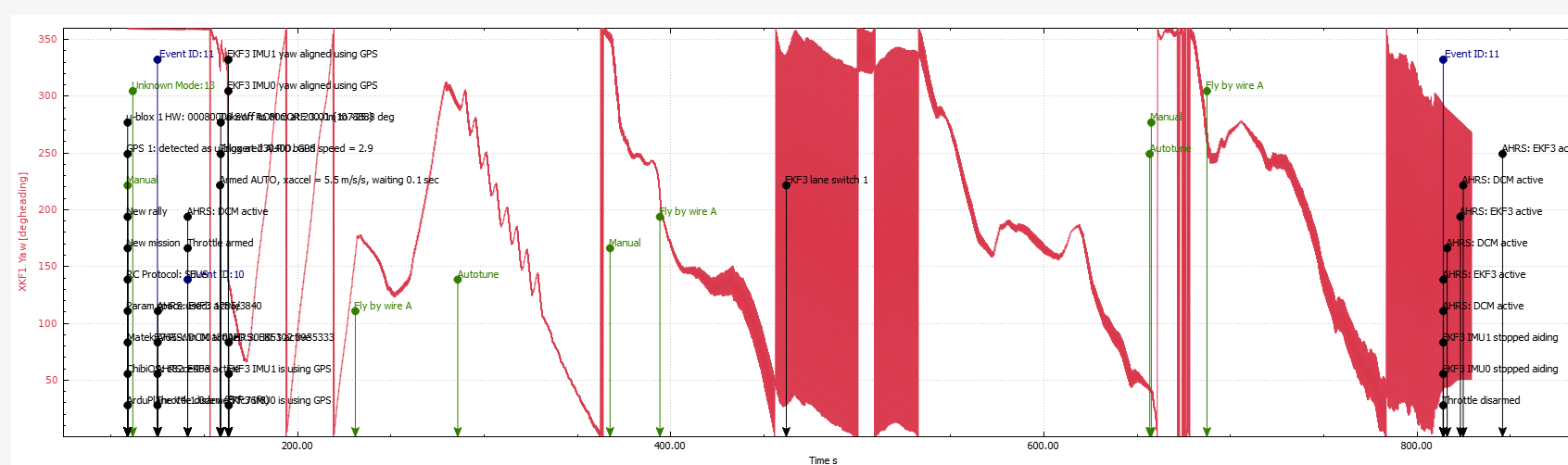
It was a pretty sick puppy from takeoff. YAW estimations are all over the place, she never know really what heading is she flying.
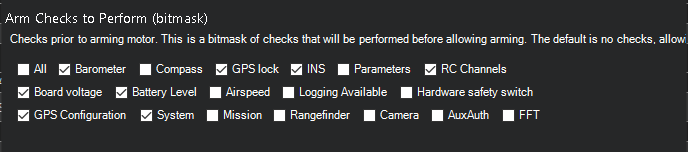
No compass and no airspeed sensor, EKF should rely on the GPS only, and it obviously failed.
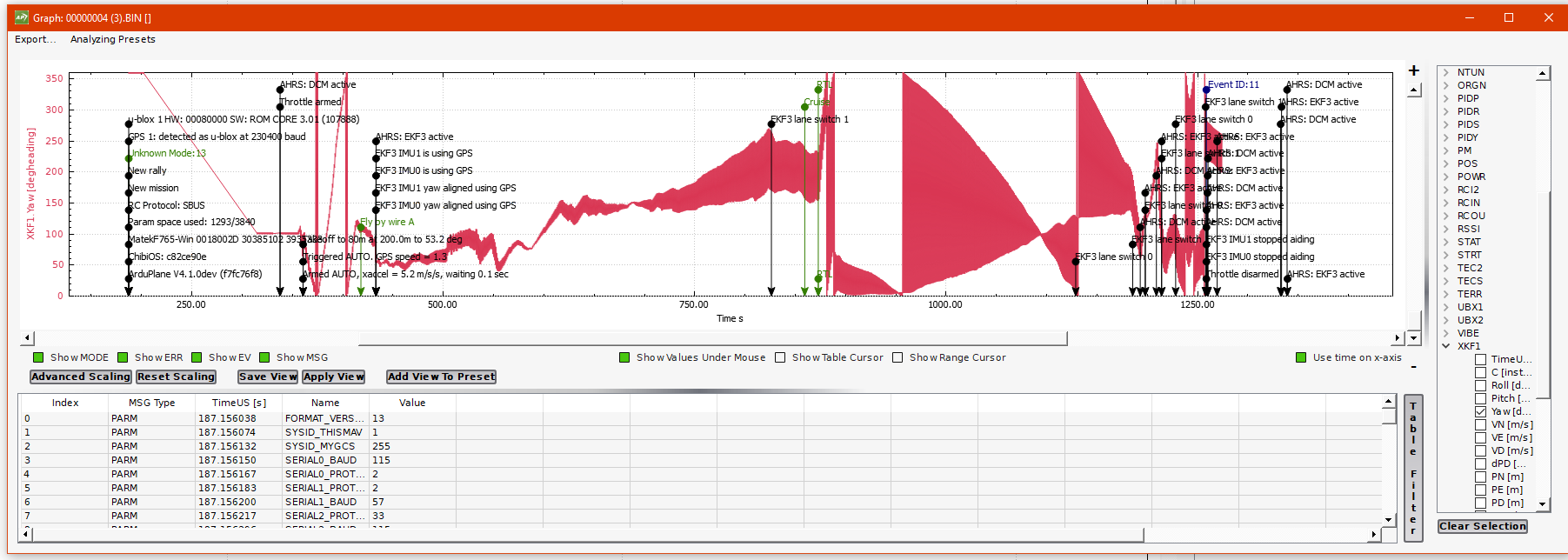
Reasons need deeper analysis, but from the log it seems that you did not wait for EKF initialization, which is afaik a serious mistake.
Also you flown a pretty old (Apr 10) dev version of the firmware, which makes everything possible. (nota bene Plane 4.1 were released in May)
Odd that the logs are indicating issues as I had waited for all the pre-flight items to provide a ‘pass’ status on the OLED display. Took off without issue and 99% of the flight seemed fine as far as the behavior indicated.
Red parts are the difference between EKF lanes yaw estimation.
Log also shows that the EKF … is using GPS messages (that indicates the initialization of EKF) come well after takeoff.
And since it was a dev code, anything can happen, if you rebuild go to at least a beta or released code.
Andras, here is a BIN file from a previous flight that all went well and no crash landing. Can you tell me if there was erratic behavior with the EKF lanes?
So is this confirmed, or most likely due to not waiting for EKF initialization?? Im a rookie with f765 wing & also trying to learn log analysis. Sorry for your loss Kerrycorcoran.