- Large (32" prop) quadcopter
- 12S LiIon battery, lots of capacity
- AC 3.5.5 on a Cube 2.1
- Dual Here
- Dual Vcc supplies
- Dual Hall effect current sensors
- Independent V supply to optoisolators on ESC (logged as Vservo in tests, wasnt logged during the autotune)
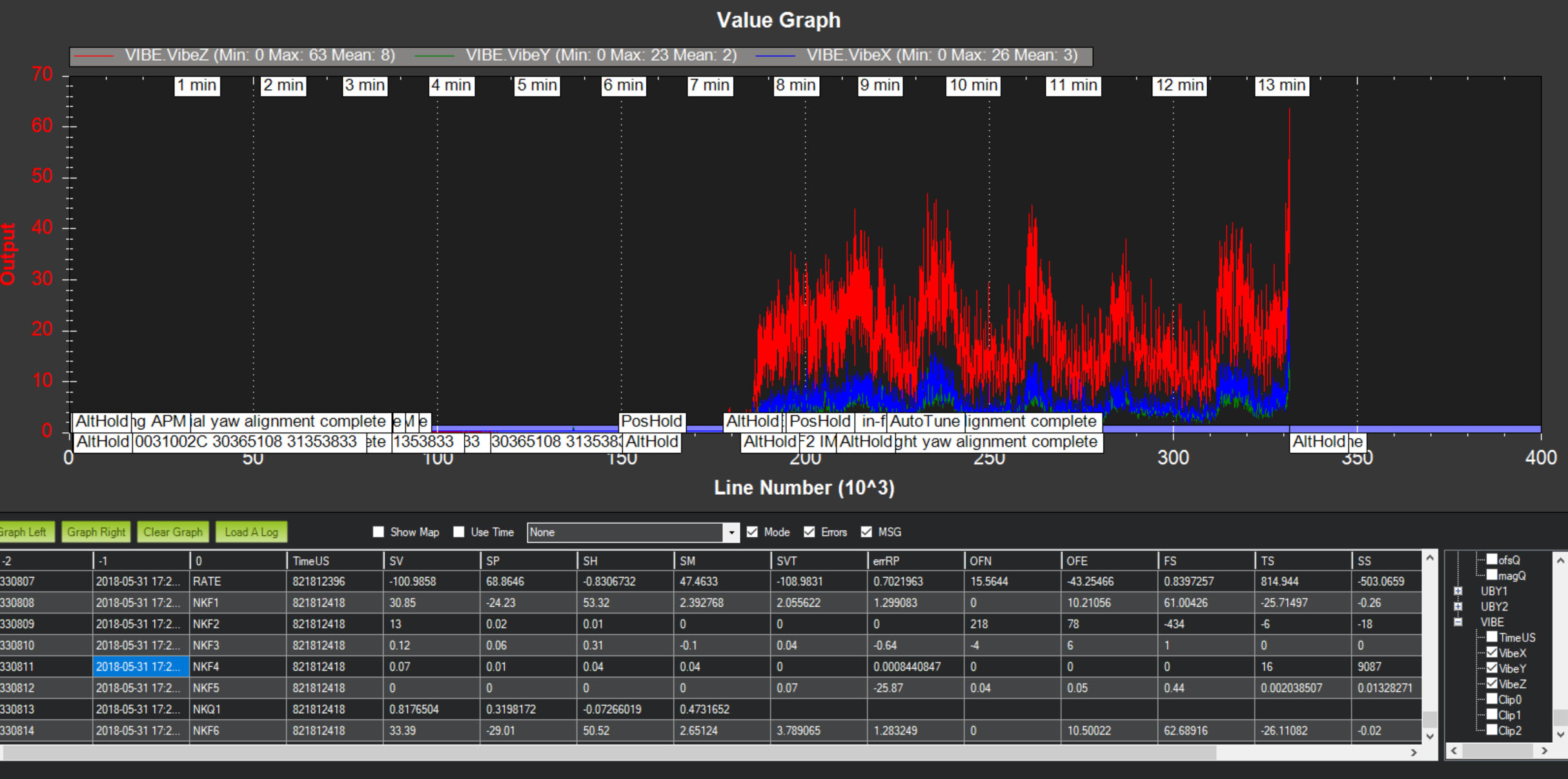
- Filters tweaked to reduce vibe noise and cube is mounted on an isolated tray
- RPM1 is monitoring an internal cooling fan
- Nothing to unusual with the setup otherwise
Aircraft was tested on the ground for 2+ hours before maiden flight - Power electronics loaded/heatsoaked/etc. Temperatures of critical items are closely monitored and logs reviewed. No indications of impending failure were noticed.
Initial few flights went without much drama, PID tuning was significantly out, however totally flyable.
Roughly 5 minutes into the autotune, while being repositioned (ie it wasnt tuning at the time), the aircraft wobbled in pitch and then dropped.
- No indications of any structural failure
- No indications of any power electronics failure (other than the drop)
- Damaged aircraft was powered back up on bench supply, no abnormal current draw, all esc/motors functioned normally
We have been over the logs with a fine tooth comb, and cannot see an issue, so suspected some sort of desync condition with the ESC.
We have replicated as much as feasibly possible, the condition/setting/loads that were on the aircraft with it strapped to the ground, and have completed some extreme testing of the powertrain, trying to cause a desync with large/instant throttle requests at 400/490Hz, without “success” (see logs attached - we did this 3 times without a hint of desync or other failure). First ground test is on 3.6/NutX with RC passthrough on Ch1-4 and SERVO_SPEED set to 490Hz. 2nd test is on 3.5.5 with Ch1 hooked to 4 motors, arm check/crash detect disabled and in Acro. Both tests have a mix on radio providing harsh motor PWM changes.
There are a number of other, obscure, things it could be, but -
Would appreciate others looking over the logs (particularly those with indepth knowledge of how Autotune updates params on the fly?) to give us some ideas on the next steps in troubleshooting. Thanks!
1.BIN - Autotune log with crash
2.BIN - Power train test 3.6/NutX
3.BIN - Power train test 3.5.5
https://drive.google.com/drive/folders/1UvJhs7ixpSPz11QY5nFtifUGs00GYBhH?usp=sharing