Hi All -
Had an autotune failure recently with a vehicle and I’m looking for help in analyzing the file. I’m digging into this too, but it’s the first time autotune has “failed” for me so this type of analysis is somewhat new for me.
Vehicle setup: Tarot Sport 650mm frame
Pixracer Pro with ArduCopter v4.4.4
EMAX MT4114 motors
Castle Phoenix Edge Lite 50 ESCs
Rotors - APC 14x5.5
Battery: 6S, 8Ahr
TOW: 6.5 pounds
I had multiple successful flights with manual tuning and setting up the harmonic notch filters. I then ran autotune on yaw and then roll and both were successful. I then moved to the pitch axis and during a “twitch” the vehicle pitched forward very aggressively, overcorrected, and I just wasn’t fast enough on the sticks to recover - but at that point the vehicle was at a very odd attitude.
Also, one other question on which gains are saved. In the message screen on MissionPlanner, I see a printout of autotune activity with gains printed and then a message like “autotune completed successfully.” However, the gains on the message screen don’t match the saved gains when I pull parameters from the board - the saved gains were a little lower than those printed in the MissionPlanner message tab. Has anyone seen this or know what’s going on?
I’ve also experienced a few instances where the autotuned gains were not saved to the board, even though I landed and disarmed with my RC autotune switch “high” as per the instructions. Is that a fluke? Any ideas on what would cause that?
Autotune is not recommend. That FC is very good so keep it stock as much as possible. I use VTOL-Quicktune lua. Recommend wiping the Params clean, re calibrate sensors, test fly.
Well, that’s a bit confusing since everywhere I see autotune is working. Additionally, I’ve successfully run autotune on a number of other vehicles, including additional builds of this same type.
I saw the Quicktune option and considered adding that step prior to autotune, but the manual tune felt really good.
I’m looking for help analyzing why autotune failed in this case.
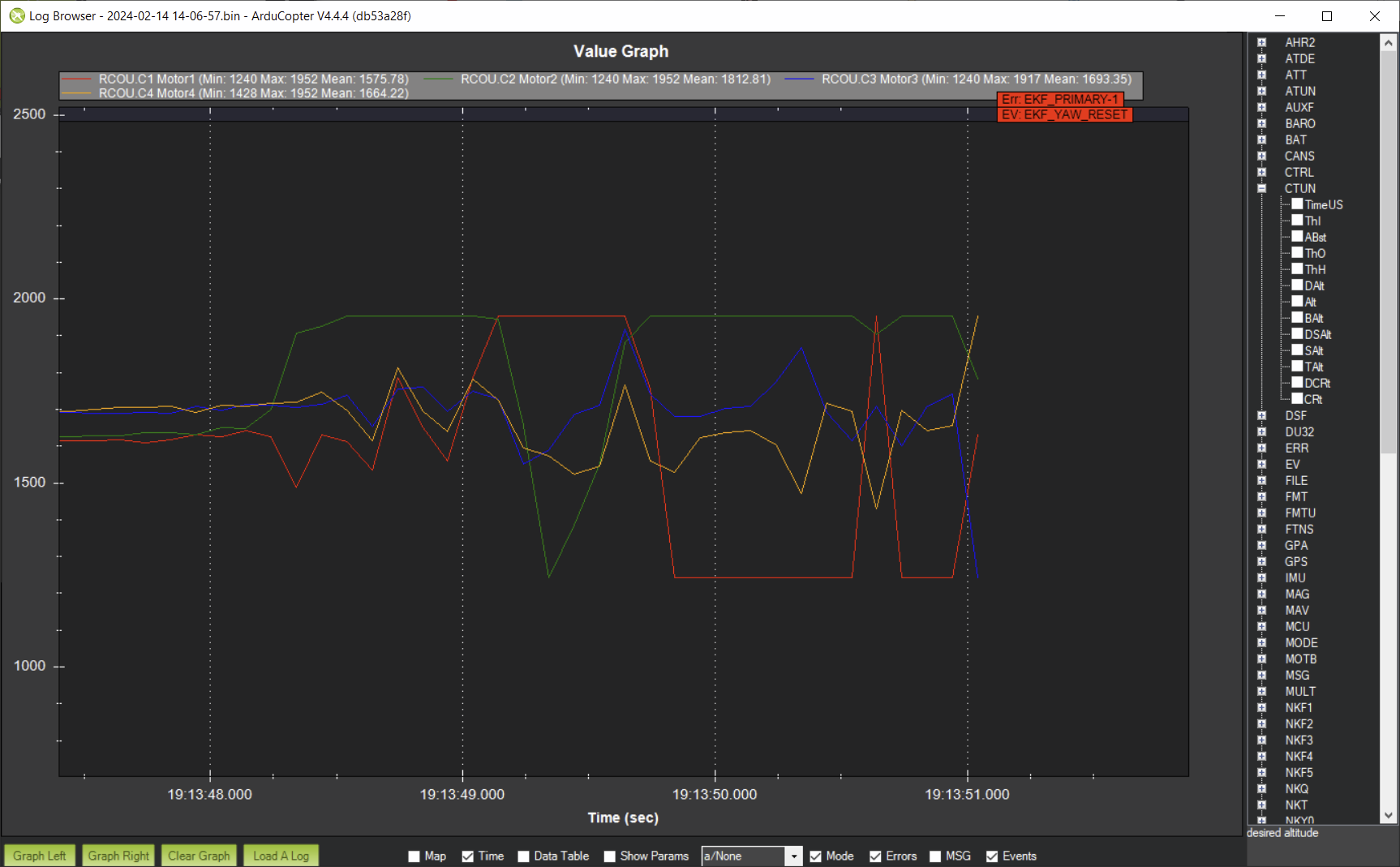
Perhaps not coincidentally your battery is sagging at this point. Your voltage scaling looks wrong for 6S, so not sure what you actual voltage is - but you can see that your hover throttle is rising. Its possible this is a desync, or maybe your battery sagged enough that too much was asked of the motor. Its worth looking at your ESC settings and certainly worth using a fresh battery for each axis.
“btw, you are aware that Randy does not want AUTOTUNE recommended, but rather point users to QUIKtune scripting due to many instances of AUTOTUNE crashes…Tridge also is anti-AUTOTUNE…just fyi”
@Quadzilla - thank you for the good discussion. This is interesting and it seems there may be different messages from developers about autotune. I think this discussion should be continued in a separate thread as my question does not relate to the merits or deficiencies of autotune, but rather what happened in this specific instance.
If you skip steps and go straight to autotune, you do have high probability of crashing. And yes, it is in the human nature to blame autotune and ignore the fact that the user skipped mandatory steps.
Then use it. That is fine. And it is even better if all the configuration procedures before the *tune (autotune or VTOL-quicktune.lua) are done correctly and in the correct order.
I asked Arderw for a better option for tuning and he made it. I like to point out that we are a open source community we are all subject to experience and have a equal voice.
Thanks @andyp1per . I think I’m following what you’re saying about motor 2. It does go to a max value after 19:13:48. That’s odd on the battery voltage - however, the battery was at 23V (unloaded) after the flight. With this setup, I’ve seen 1-1.2V drop when loaded.
The ESC setup is another good angle - do you or anyone here have recommendations on setting for Castle Phoenix Edge 50 Lite? I configured the ESCs for “multirotor” mode using the Castle Creations software which has their recommended settings. These ESCs log data as well so I’ll pull that file and look at it.
@Quadzilla - that’s awesome you tested the Pixracer Pro! I’ve used the Pixracer variants for quite a while and have had good success with them.
Another related question / discussion point: is there a recommended axis order for running the autotune? I did yaw, roll, pitch - does the sequence impact anything?
Don’t have any suggestions, but just wanted to point out the CC Edge 50 ESC uses PWM signal, so it will need throttle calibration to know its max throttle.
Thanks! I’d suggest stating that explicitly in the documentation for autotune as well as your guide. To be clear, I i read your guide and and saw that order but did not see anything that said the order impacts the outcome.
Please read my posts, I constantly say that the exact order is important. The Blog is already close to the 64000 characters limit. I do not think that it is helpful to explain for the 1001 time that the order affects the outcome.
But do correct me if you think otherwise. And any way that can be used to reformulate the document to make it clearer is also welcome. But I will not make it longer and I have repeated that the order is important many times.