this is my first post in this forum. I had a crash with my endurance copter today and no clue where to look in the log. The Copter had quite a few hours of air time. I used autotune last week to set pids after winter break. Had no problems flying it for quite some time. Today i started for another test flight. I switched to loiter and after some tome the copter began to roll and pitch quite heavy …
I tried to read the logs myself but have no clue where to look at. Maybe someone is able to tell me what was going wrong ?
I can see what brought the copter down in the logs but not why??
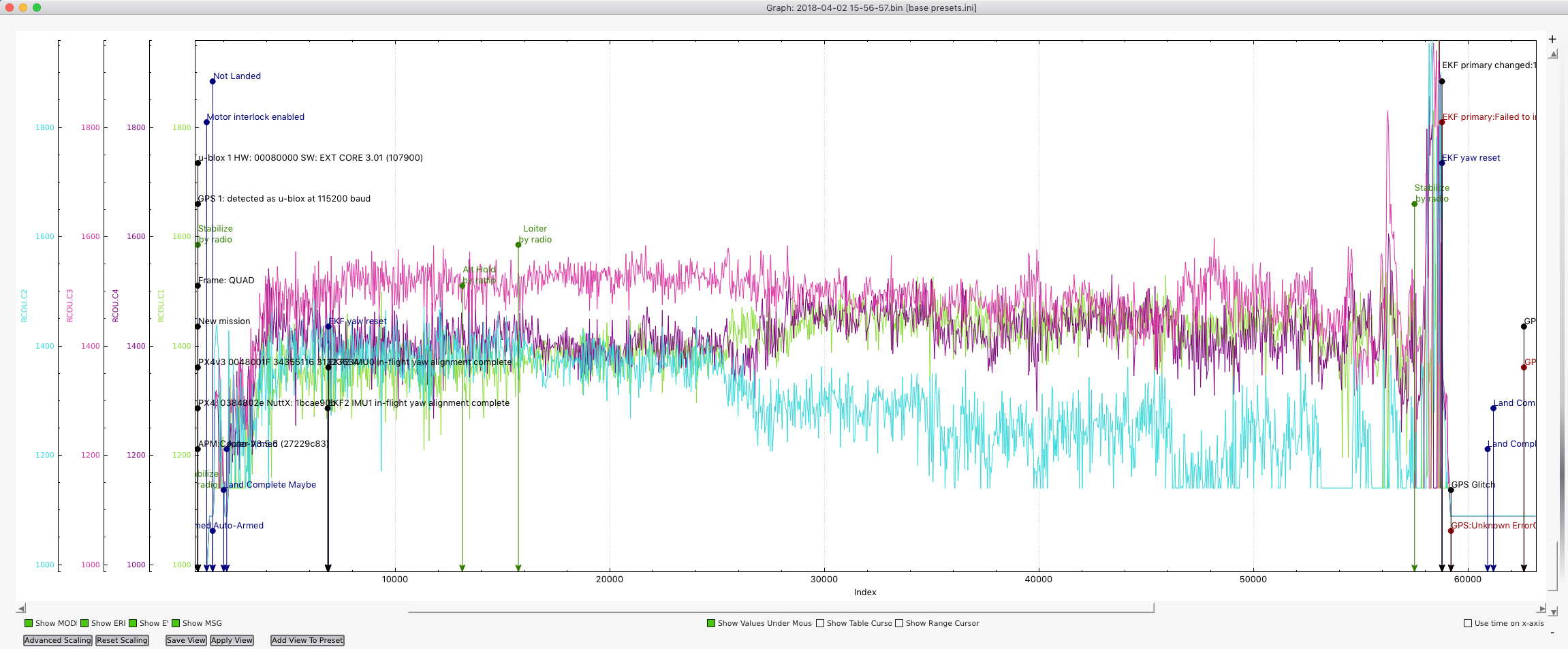
It looks like an electrical or mechanical failure of the copter but the strange part is the RCout on motor 2.
Initially motor 3 is working quite a bit harder than the remaining motors.
Then about half way through the flight it merges and motor 2 diverges down???
Usually in this case I would expect to see its opposite go high to counter what was wrong.
Was there a lot of wind?
For some reason motor 2 is all but shut down.
thanks a lot for looking at my Logfile. I will have a look at the motors then. There are no mechanica or electrical problems (even after the crash -> no broken arms or propellers … no bend motor shafts… only a broken landing gear. Motors and ESC still working). I will test them on my trust stand this evening. Maybe there was a little gusty wind …
Shoudn’t the copter be able to recover from that if he is high enough ? Do you think that i have to change something to the PIDs i got from autotune ?
i’ve read the autotune wiki article serveral time before using it the first time. The Quad was stable for nearly 2 years now. My only change was updating to 3.5.5 and new auto tuning. I will check the motors and ESCs next. And yes: i use 16" T-Motor Props.
I read about possbile ESC / Motor desync in other threads … do you think this is possbile in my case ?