Dear community,
I am trying to find a solution to my issue I met recently while flying with my quadcopter.
The quad has already flew 10H without any issue with good behavior on low and high wind conditions.
Before the crash, the quad was in the air with a well-mounted payload of 2kg (a box) and flying well. I did a hover in loiter, yawed a little and suddenly the drone rolled left quickly, then back to position then left and flipped leading to a crash. This event happened in less than 3sec. Conditions were windy.
You can find the log attached.
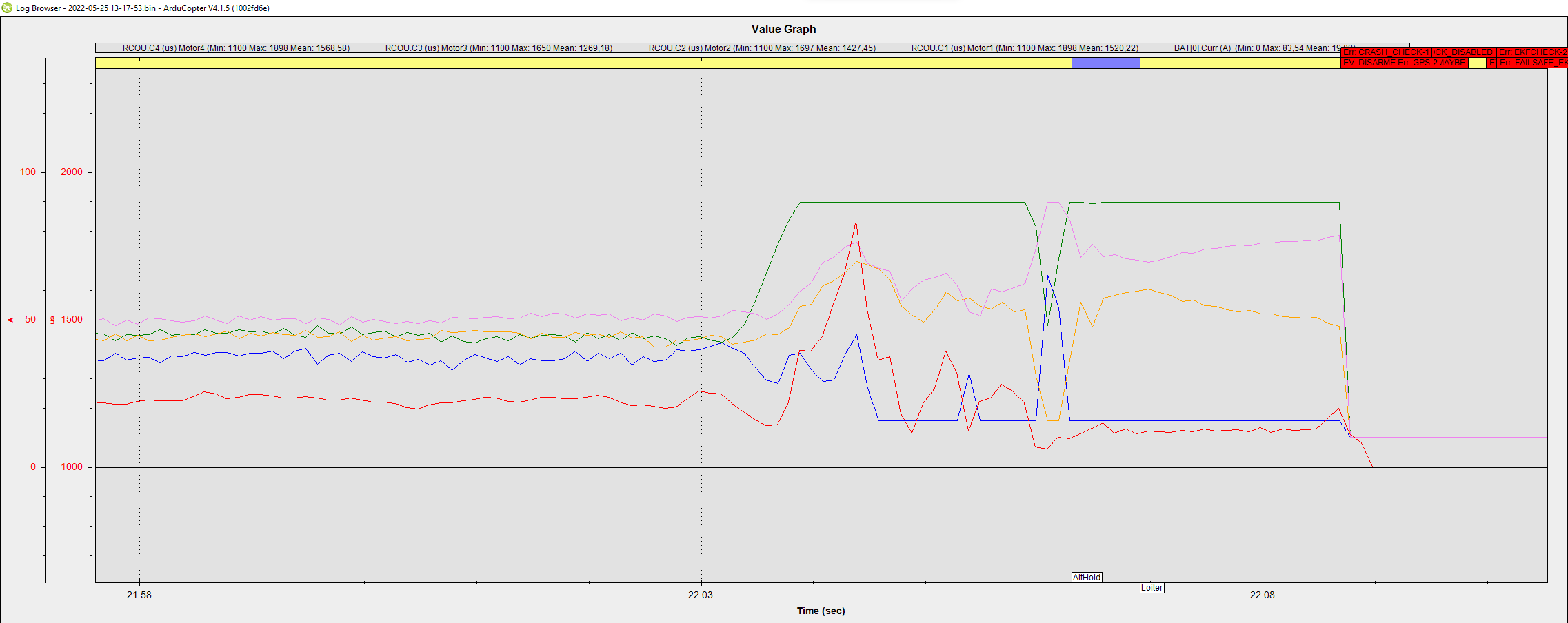
I am quite surprised that the speed input on motor 4 raised to full throttle and at the same time the current dropped (inconsistent no ?)
My copter config :
- Quadcopter X4 with arducopter 4.1.5
- Cube orange
- PDB : Mauch PC200A
- motor : t-motor mn701-s
- ESC : Alpha 60A HV
- Batteries : 2x 6S plugged in serial for 12S
- propellers : 26"
- Payload capacity : up to 10kg
Pictures of the drone :

