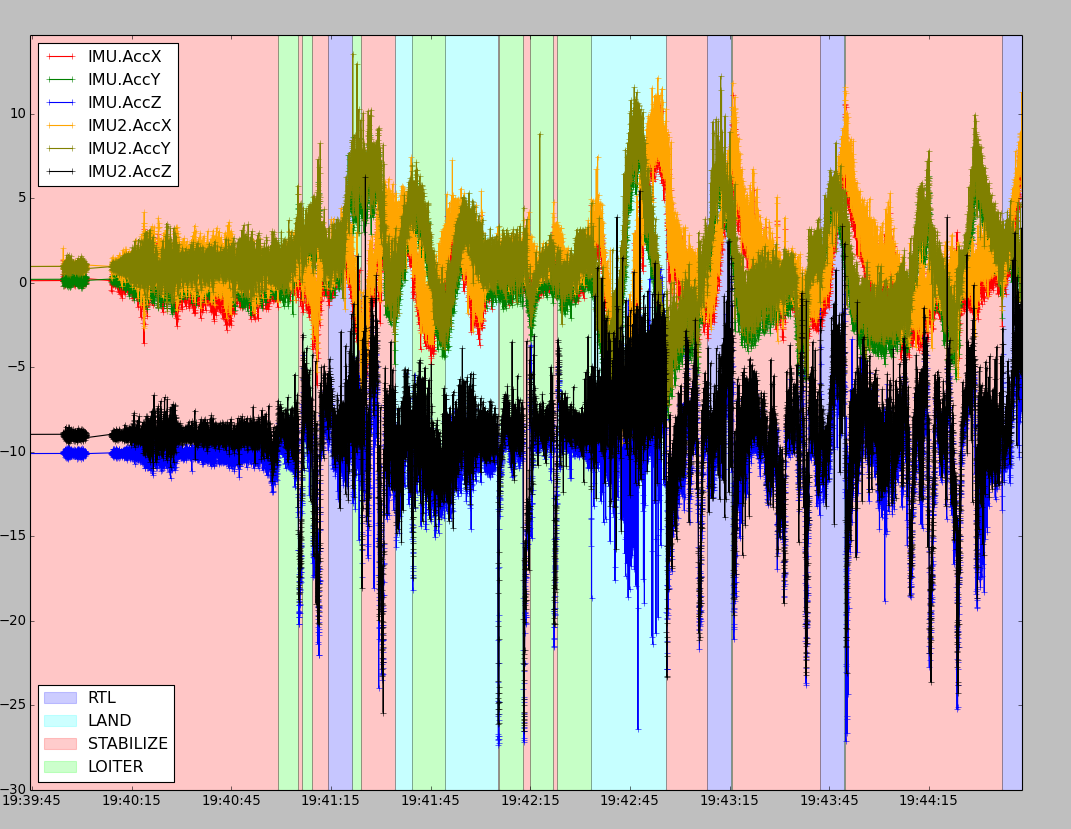
Hi, I´m Max recently I replaced my Arducopter with Pixhawk. I performed all configurations and calibrations. In hexacopter test flight the controls don´t respond and finish with Drone crash. The Fence failsafe was active, but the lost control happened before that. I hope you can help me.
You are right, but when I change to Loiter Mode is when I lost control and the vibrations increase because the copter was out of control. The pixhawk is mounted above foam, I used to mount APM in foam and never caused me problems.
Sometimes foam can worsen the problem but I always try to fix the vibration cause first (balance props & hubs, look at motor vibration as well).
I use Kyosho Zeal stuff with great success.
4 little qubes in the corners of the Pixhawk works for me but i spend some time before figuring that out.
In the end bought better quality props as well. Graupner E Props, Xoar and T-Motor are the best in my opinion but they tend to be expensive as well though most of them dont need much balancing.