Hand launch yesterday ended in a crash on take off. No change of configuration since previous flight which was a success.
It appears to me to be a stall/wing drop and into the ground. The previous flight had what appeared to be an uncommanded left turn immediately after take before sorting itself out.
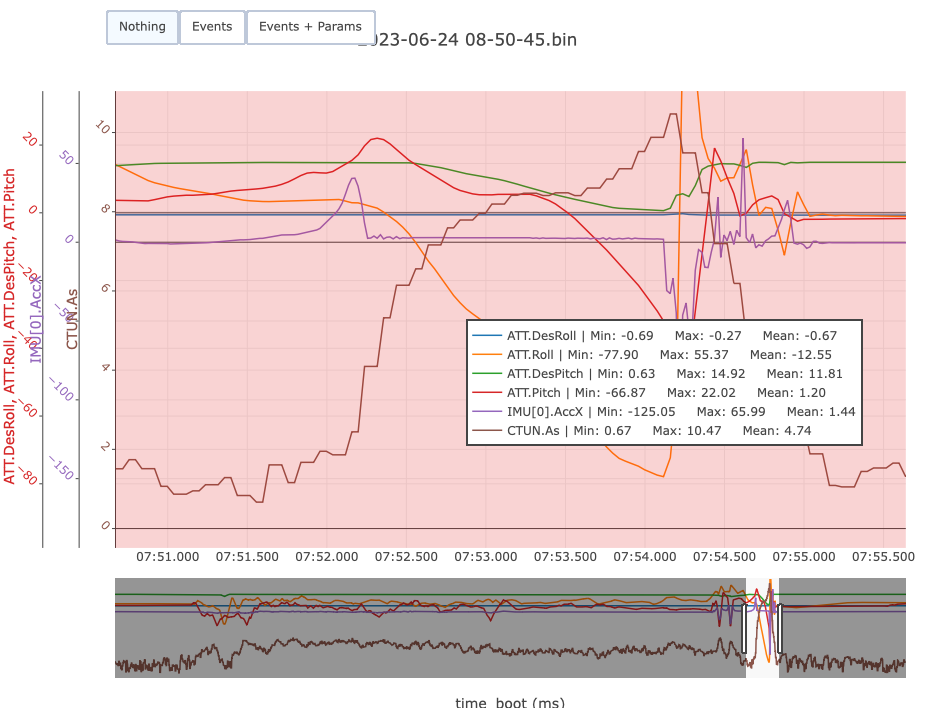
When I look at the log I see a long delay after the left wing drop and a command to roll right. Of note there also seems to be an heading discrepancy.
Interested if anyone has any opinions.
Edit. Takeoff was auto with the first waypoint a few hundred metres upwind.
After a discussion on the discord I am beginning to think that the heading error (hdg 90 deg to the right of plane) is a factor. AHRS and Compass orientation checked and there were no compass calibration errors.
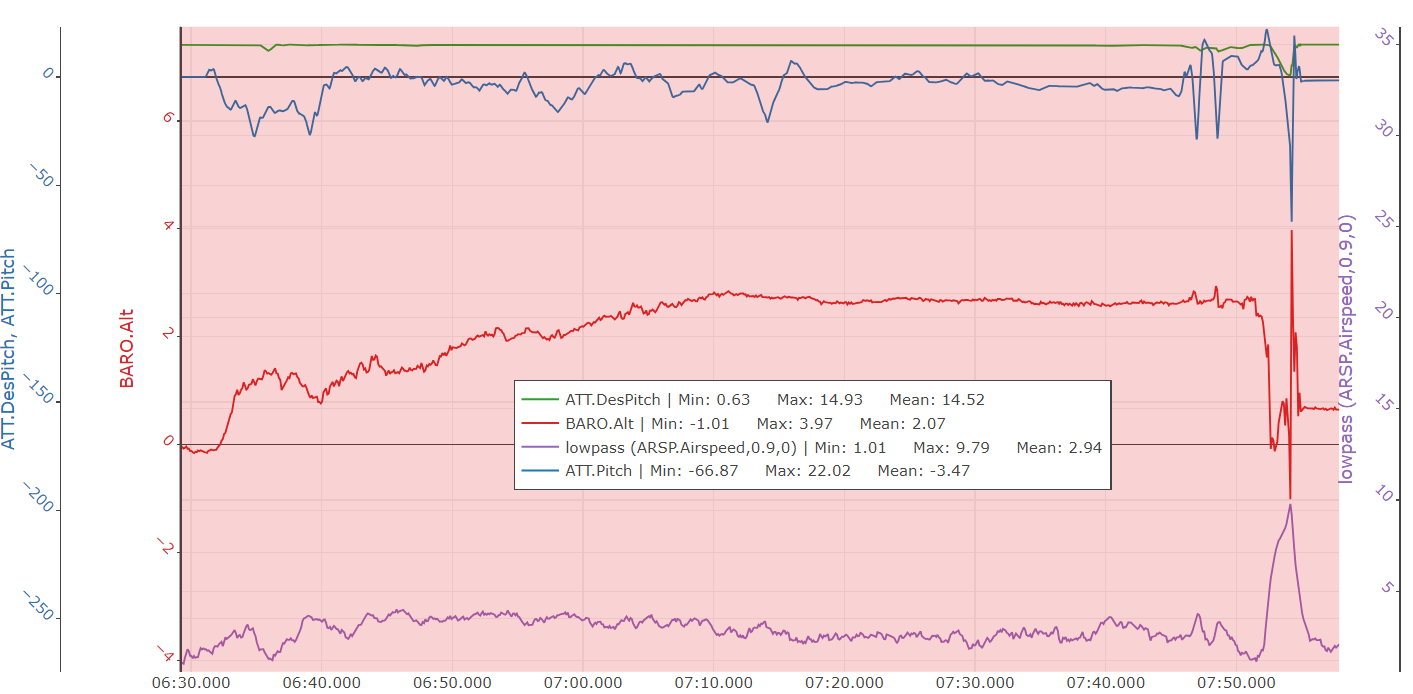
Regarding the slow airspeed, it was only in the air for about 4 or 5 seconds so that is likely the ambient wind.
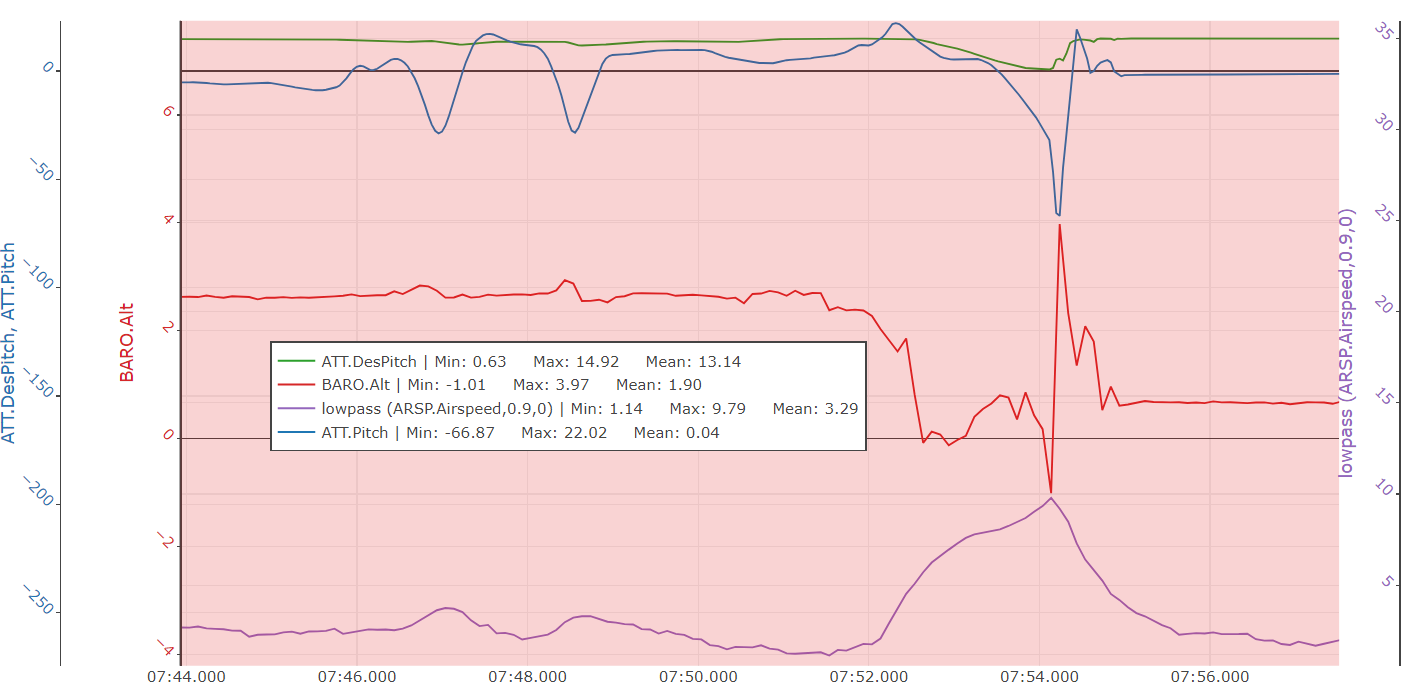
It appears that there is no command for the left turn and is a result of the low launch speed. Next time will be a less casual throw and I might investigate a little more take off flap, and maybe a bungee launch system.
I dont really want to go down the road of a larger motor and therefore less efficiency in the cruise.
4-5 seconds is an eternity in processing and sensor polling time. The airspeed should be accurate over that period if the sensor is healthy and properly installed.
Be careful generalizing efficiency that way. Driving a small motor hard could easily be less efficient than driving a large motor at low demand (it’s a complex subject that would require more data to fully explore and depends on more than just motor size).
I only mentioned that the airspeed as a previous point was that it was dangerously low and possibly a faulty sensor. However from launch it reacted as expected and while never reaching flying speed it appears to be reading correctly over the flight envelope.
I’m very happy with the engine and prop combination in the cruise/loiter and while it might be on the very limit at the current weight I would prefer to avoid making changes at the moment if I can. Always open to changes in the future but leaning towards energy inputs from outside the system if possible i.e. bungee launch or drone launch or required to get airborne safely and routinely.