Hi I’ve just finished building an AR Wing running a Pixhawk with Arduplane V4.0.9. Last night we maidened the wing with a friend of mine flying who is a very experienced pilot he flew it around and trimmed the pitch on the controller in manual mode and had it flying ok. I then asked him to try FBWA mode to see how stable it was. He climbed the wing then levelled out and I flicked the switch on the controller to FBWA, the wing then banked and went into a steep dive. I got it back into manual mode before it hit the deck but not soon enough to pull out of the dive.
When I tested the wing on the ground the elevators were behaving as I would of expected by counter acting any roll I applied to the model.
I’ve got the log files but I cant really decipher what went wrong. Unfortunately the plane was sitting on the ground powered up for a while before the flight so the log file is quite big.
sorry for that crash. imho the flight log shows there might be some room for improvement. anyone correct me if i’m wrong please:
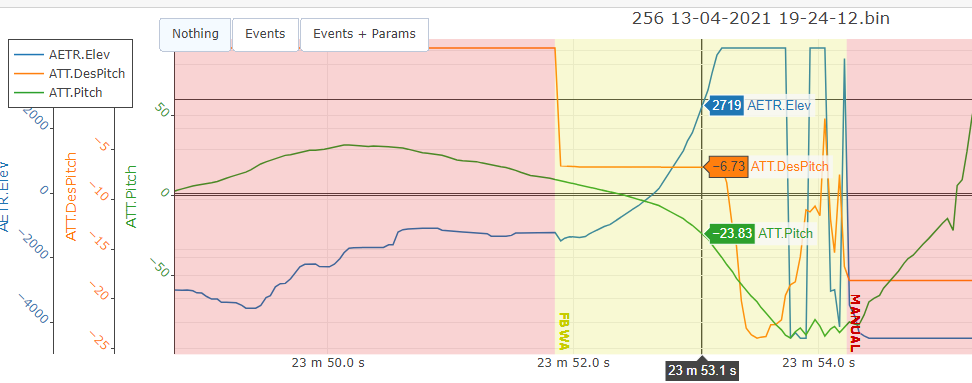
are you 100% positive your pitch direction was set correctly (moving plane’s tail up results in both elevons deflecting upwards / vice versa)? imho it seems, once you’ve switched to FBWA, your controller is frustraneously trying to counteract the plane’s pitching down but maxes out on full servo deflection - possibly in the wrong direction. your transmitter trimming in fact added a ~ 10° downpitch demand, but your plane pitches down way beyond that while your elevons keep adding downward deflection. i’m not too good at diagnosing this from the utimately short FBWA flight phase though, someone more knowledgeable might chime in. to me it seems your controller’s pitch output is consensual with transmitter pitch direction in manual mode, but diverges as soon as you switch to FBWA:
after having done RC calibration, don’t ever change your transmitter’s trim unless you really know what you’re doing. by changing your transmitter’s pitch trim from center (~1500 ms) to ~ 1360ms in MANUAL mode, you added what your flightcontroller reads as a noticeable downpitch demand.
mind that you want to trim your SERVOS, not your transmitter. this is usually automated by setting SERVO_AUTO_TRIM to 1, which you have done accordingly. maybe check the docs again for how it works: https://ardupilot.org/plane/docs/auto-trim.html#automatic-trim
you’ve set LIM_ROLL_CD to 60°. this allows the autopilot to demand a 60° bank in auto flight modes. mind that these are not designed for aerobatic flight. actually there are aerobatic flight modes (ACRO) that allow very responsive flight performance without having to sacrifice safety in auto modes. check the docs for further reference.
you’ve raised your servo mins / maxes to ~1000-2000 while having your pitch and roll PIDs at default. chances are your servo travel was set overly generous to make travel in FBWA match the amount of travel you get in MANUAL mode. due to how the controller works this is not a good idea. don’t misjudge your plane’s inflight performance by the amount of servo travel you get on the ground in FBWA mode. start with the defaults, get your plane fly well, then adjust if required. on most medium - small sized elevon-type airframes you will rather want to reduce surface travel and PIDs a bit than crank them up.
on first flights always keep your finger on the mode swich, at least until you’re positive you’ll get predictable performance in all modes. if your airframe stalls, shows unpredictable response in assisted / auto modes or does something weird, switching back to manual asap is your best bet.
In spite of best intentions, that didn’t help. I will second what @vierfuffzig has mentioned, and you should never use the trims on the radio unless you stay in manual mode. If you’re old school RC plane and insist on timing manually then after you land, mechanically adjust the trim and reset the radio to zero trim. If you have trim set on the radio when you go to an automated mode the FC will see that differential between the RC’s new trim and what you calibrated as your radios trim position (RCx_TRIM) as an input and act accordingly, even if it’s not good.
So we went back to the field last night for a test last night and discovered that although the control surfaces were responding to stick inputs as expected in FBWA mode. They were compensating in the wrong direction! We played around with reversing rc inputs and servos and got it working correctly. Then had a short flight.
We started in FBWA but the plane was oscillating around a lot so we switched back to manual mode.
I need to reduce the servo throws and find some bench mark PID’s.
But it was definitely a step in the right direction.
thanks for reporting back! that would infact match what i suspected. it really pays to make checking correct servo response prior to every single flight a habit… hope you‘ll have some awesome flights after fixing this!