The other day my drone crashed while flying on Loiter Mode. I took off and it was stable for a few seconds but suddenly it moved sharply to the right and crashed to the ground. The drone is a hexacopter Tarot X6.
I am new to this so I don’t know what may have happened. I checked that the motors are in the correct order and the propellers are in the correct position. Also, I calibrated the ESCs and the compass before flying.
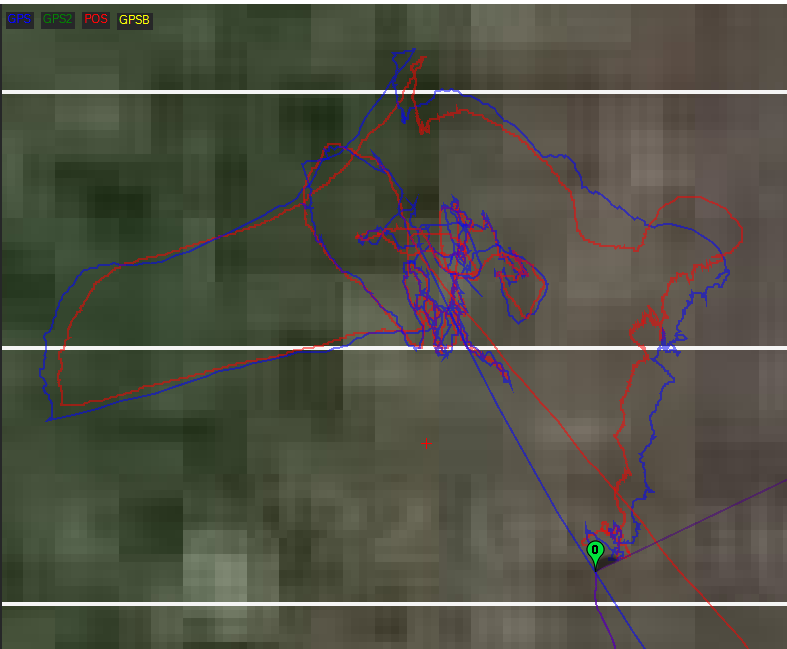
Set this to ensure you’ve got a good 3D Fix and Home before flying
FENCE_ENABLE,1
and try GPS_GNSS_MODE,1 or GPS_GNSS_MODE,5 or GPS_GNSS_MODE,65
to see what gives the best result. Use the selection dialog in MissionPlanner to pick different GNSS constellations but only choose one or two, not 3 or more.
Reading your params from that large log was tricky
Check you value for ATC_INPUT_TC , 0.15 to 0.3 is typical, I use 0.2
Set these if you haven’t already
INS_LOG_BAT_MASK,7
INS_LOG_BAT_OPT,0
I advise to start in Stabilise or AltHold modes, only switch to Loiter if takeoff has been successful and everything looks good. Once there’s more successful flight time arming Loiter could be OK.
I suggest do another test flight after that and let’s see that log file. Just hover for a while in ALTHOLD and some gentle pitch and roll movements.
If flight looks stable switch into Loiter for a short time and watch for instability.
If AltHold was nice and steady, but Loiter showed oscillations then halve the value of these:
PSC_POSXY_P
PSC_VELXY_D
PSC_VELXY_I
PSC_VELXY_P
and do another test.
There’s some oscillations during arming, maybe wobbly landing gear?? Could be related to the position controller tuning though, since you appear to have been arming in Loiter.
Share the new .bin logs too and we can check more.
I changed the parameters and have done some test flights as you told me.
I have done two test flights in Stabilize mode. When taking off there are some vibrations but I assume it is due to the landing gear. After taking off, there were no visible oscillations but the drone was drifting, not hovering. It was windy so maybe that was the issue. Also when landing, the drone flipped due to the landing gear.
The next day I will try in AltHold Mode and if everything goes fine I will set up the Harmonic notch filter as shown in the Documentation.