Hi everyone!
I use ArduCopter for around 4 years and have read in this forum many times for various reasons. This is the first time writing because I need your help with the analysis of a crash, we had some time ago. Our commercially used Octocopter, worth around 12 k Euros (13 k$), fell from the sky like a stone from a height of about 80 m. Fortunately, there have not been any personal Injuries on the industrial site we were flying. We would be happy if you could help us understanding the exact course of events in order to reduce the risk for future flights.
Vehicletype ArduCopter
Firmware Version V4.0.1-rc2
Firmware Hash f6121406
Logfile: https://easyupload.io/7io8t5
BinFile: https://easyupload.io/042t49
We already did some research with the log file and came up with a basic theory:
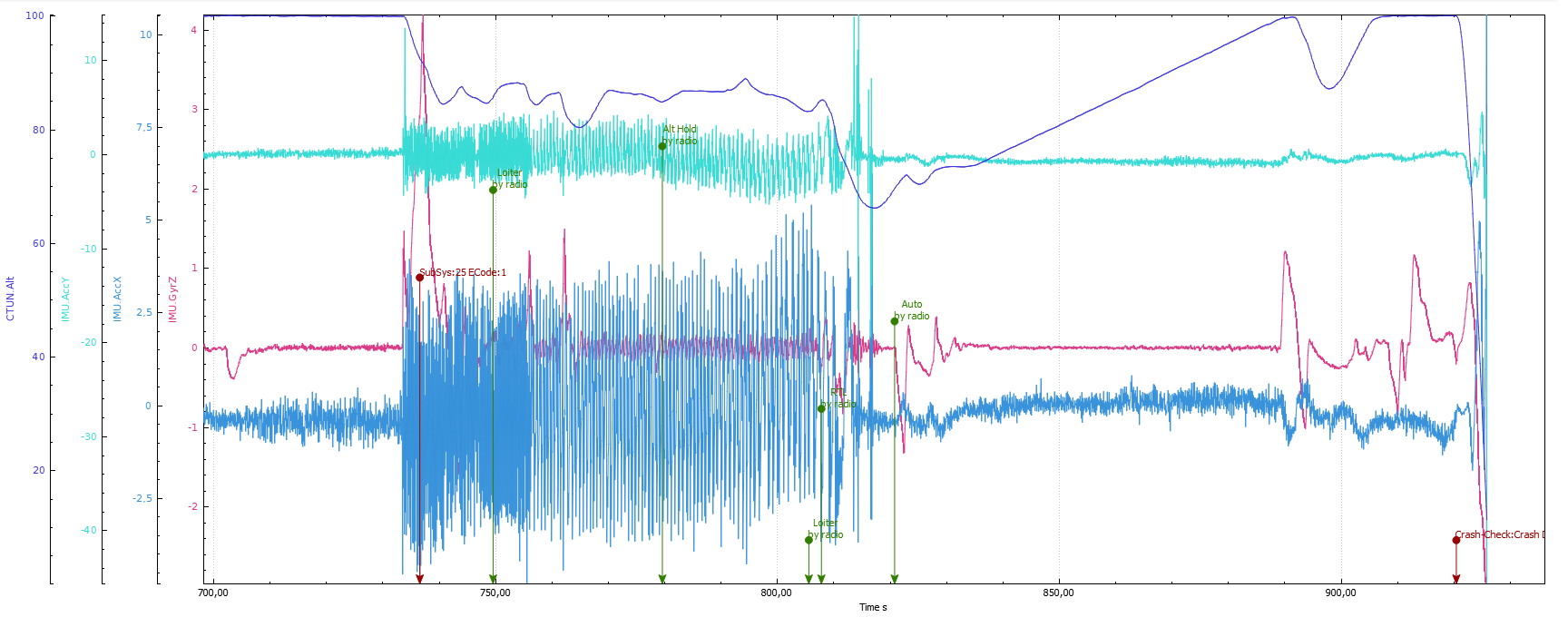
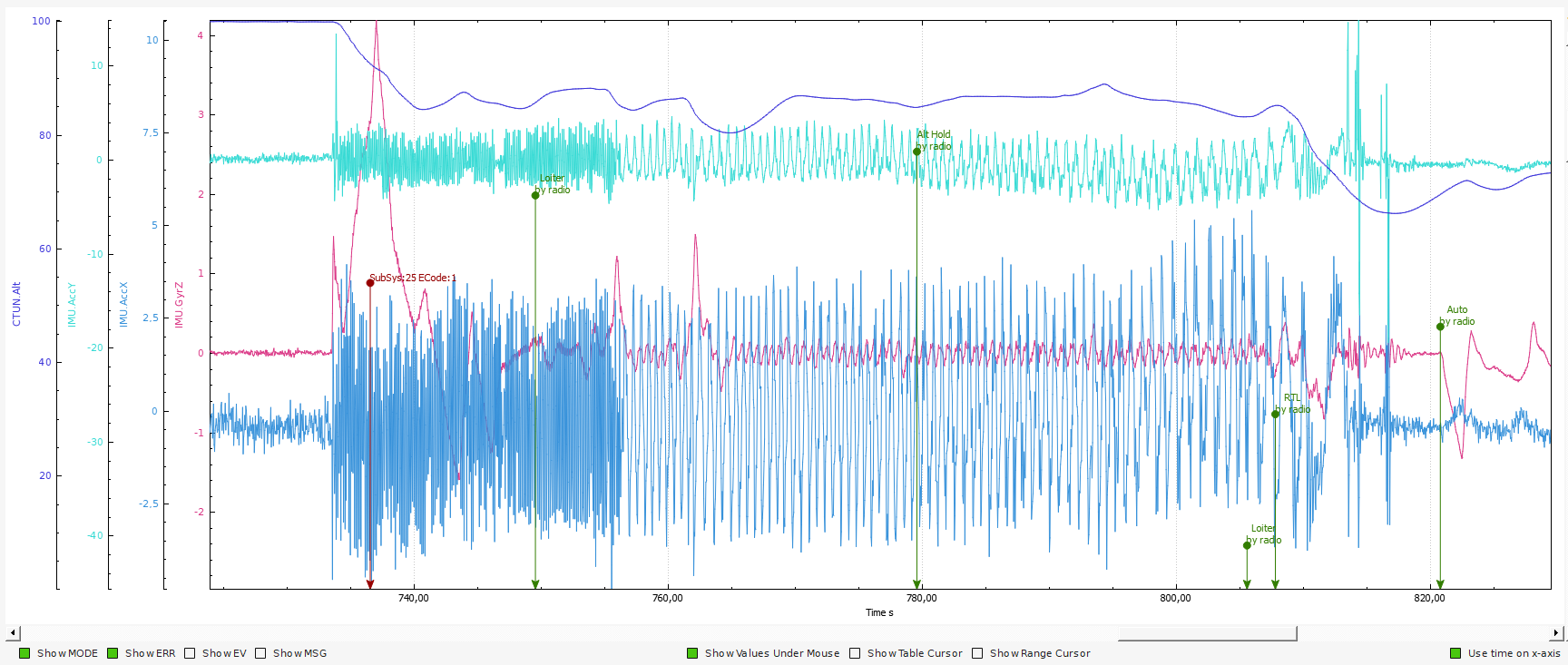
• The copter is following some waypoints in Auto Mode
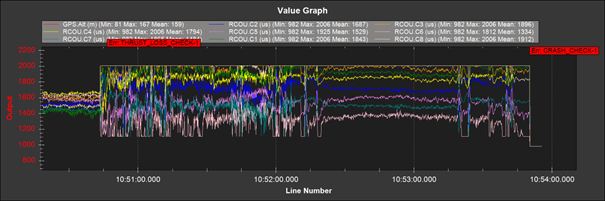
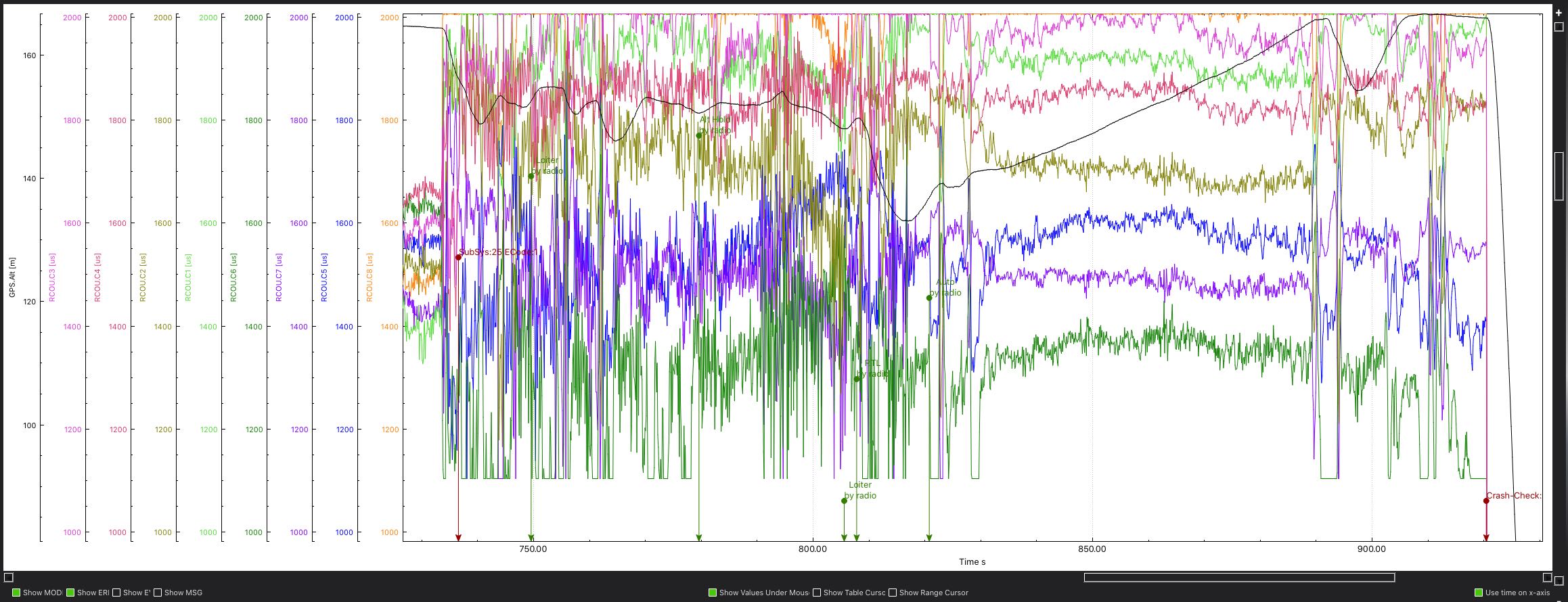
• The ESC or motor No. 8 suddenly fails. The copter loses some height but does not fall down since the other motors are able to keep the copter in the air. There is a thrust loss error shortly after the motor fails.:
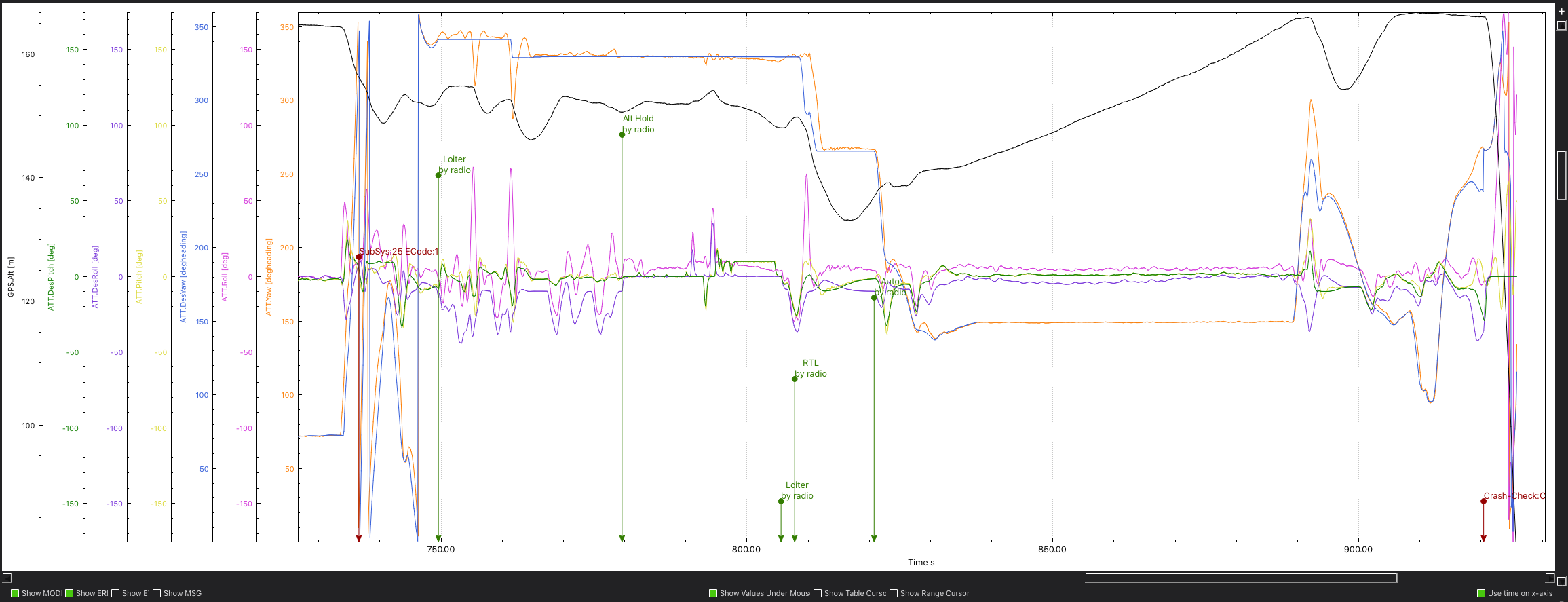
• The copter drifts/flies away and loses even more height and cannot be navigated back to the original flying zone by the pilot. The pilot switches to Loiter mode and later to altHold mode and then even RTL without any results.
• After some time, the mode is switched back to Auto (by the pilot we suppose) and this tells the copter to fly to the next waypoint, which (for some reason) works and the copter is flying back to position near the pilots and even regains its original height.
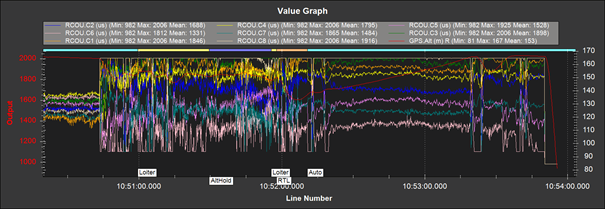
• The pilot plans to land the copter, it starts rotating and suddenly all motors stop and the copter falls down. The log file suggests that a crash check has been released an stopped the motors.
Of course, a failure of an ESC is something that can happen anytime. However, we thought that an Octocopter should still be able to keep on flying for a safe landing. And apparently before the crash this was the case here.
We still have the following Questions.
- Can you verify or disprove our theory of the events?
- Why did the coper drift/fly away after the motor/ESC failure? And why did it come back when in Auto Mode?
- Why did the copter stop the motors in mid-air? Is the crash check function supposed to work this way or is there a need to improve the software somehow?
Thanks in advance for your help!



 and yaw bias.
and yaw bias.