Hi, I’m trying to tune my hexacopter, a DJI F550 with a pixhawk and AC 3.5.7
It is overpowered right now and MOT_THST_HOVER was automatically set to 0.143
After a minute of fly, in position hold I’ve notice a little oscilation in roll and a few second later it start to loose altitude. I was able to go to manual and increase power and I think that I could make the land a little softer.
I attached a log file and here it is a video from an onboard cammera.
Seems to be a combination of a few issues here.
-
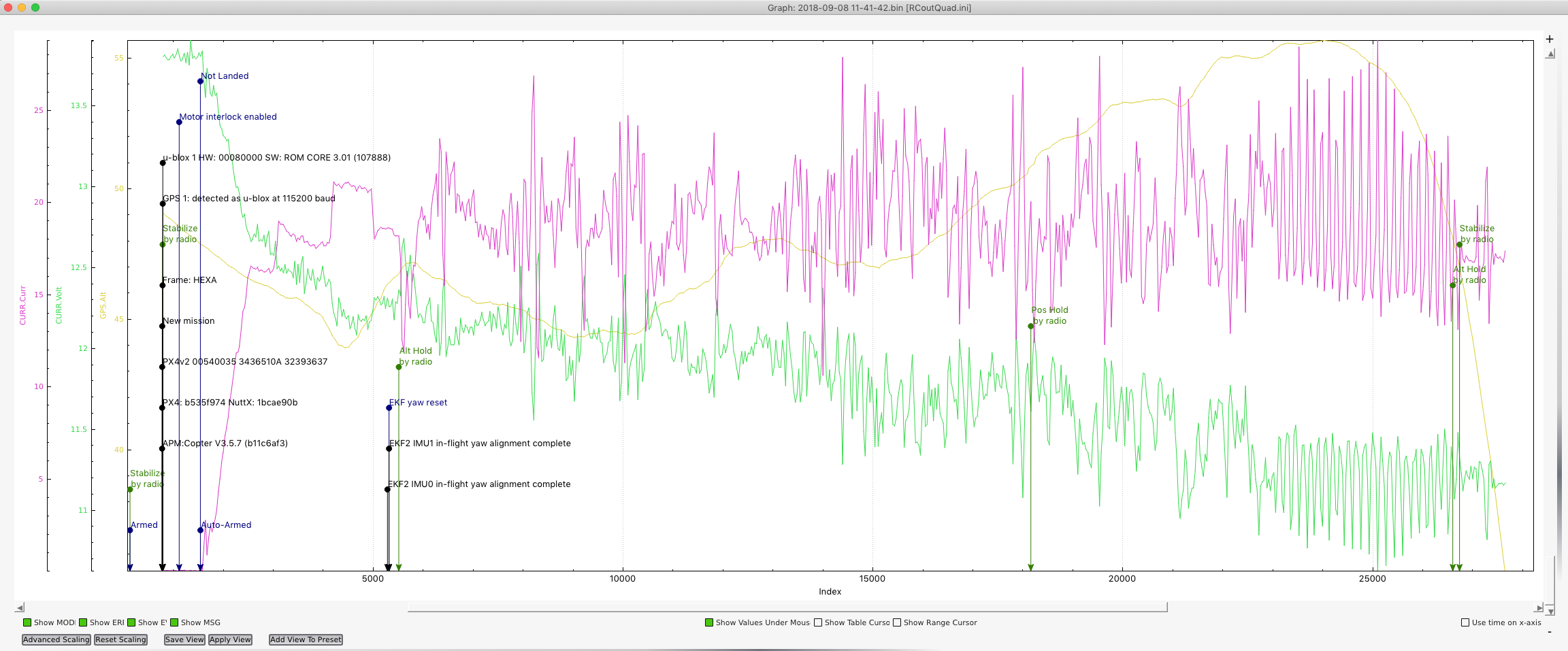
Power. What battery are you using because it does not seem up to the job. Voltage drop is severe with a start voltage of 13.8 dropping to 11.1 when the oscillations set in. If your using 3S then the battery sensor needs calibrating and your final voltage would be around 9.9v. So you’re running out of power for stability.
-
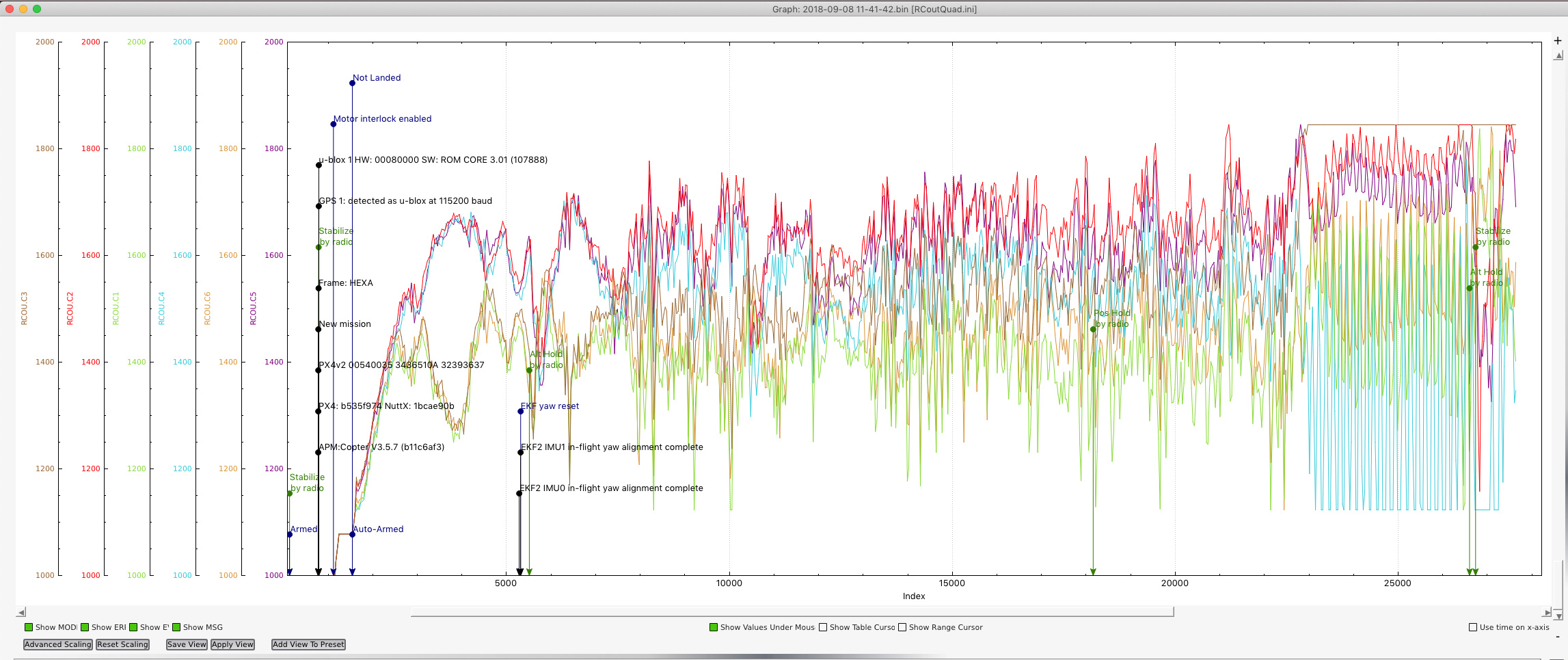
Balance. The copter is not overpowered, hovering at a rough average of RCout of 1500 which is spot on.
But
The copter seems very unbalanced in yaw, with RCout 2, 4 & 5 working harder than the other 3. This would indicate out of alignment motors, frame twist or some other mechanical problem.
It also looks like motor 3 has had a failure, as it goes max and its opposite is shutting down to compensate.
Thats what precipitated the bad oscillations. -
Tuning. On top of all this the tune is not very good.
You can see here how it is fighting to keep actual and desired together.

So all in all it did well to stay flying with low voltage and one failed motor.
thank you very much for your explanation!
The battery seems to be the first problem. It is an old 4S battery. I setup a low battery failsafe at 13.6V (did not have that in last flight) and I could flight for almost 1 minute after alarm sound and land. I change the battery for a new one.
I think that it is overpowered becouse of the low MOT_THST_HOVER parameter. it is 0.14 to get hover at about 1500 rc output. But, anyway with 0.14 it hover at RC mid position.
I do see some problem in yaw. I can’t identify what is wrong but I do notice that the hexa make a yaw turn and compensate it. Could it be related with magnetometer? or it is certainly mechanical problem? It is a new frame with original DJI ARMs. I will check motor mount.
Motor 3 faild for low battery, right? there is no problem with it, right?
I will try to tune PID, but first I need to solve yaw problem…
Ok, I measure all ARM distance and found some missalignment. I correct them and made another flight. I lowered PID gains but the flight is not as good as I think it could be. There was some wind, but not too high. It almost night here, so I could make a very short flight
This is the log file. I think I need a better tune. Is the autotune the best option?
thank
Once you have the copter flying an autotune is regarded as the next step.
The default pid’s are good for average flight, but that is just together you tot he autotune, as every copter is different.
Have calibrated the ESC’s?
Have you checked for sync problems between ESC and motors?
Could it have been a loose prop?
Something stopped motor 3 from delivering thrust as the controller just maxed out the output and was dropping its opposite number to zero to maintain stability.
I’ve calibrate the ESC but will do it again.
How can I check sync problem?
There was no loose prop. They have an embeded nut in it.
Could motor 3 be stopped becouse of low batt?
Thank Mike for your help!
Search the wiki for sync problems and how to test.
Usually its low kv motors and large props that precipitate this so I don’t really think it applies.
But you did lose a motor.
Do you use bullet connectors in the motor wires?
Probably best to go back to default PID’s and start again.
It seems to me that ESC were not calibrated.
I’ve calibrate them, I’m sure. But it seems that after some test I reflash the pixhawk or something else, becouse now, after make mandatory hardware steps again, when I arm my motors they start to spin at low speed. In the video test, the motors didn’t spind before arming.
I made a short flight today in postion hold but there was too much wind and can’t make autotune.
I will reset my PIDs and wait for a calm day, then I will try position hold for a couple of minute. Then, if everything is ok, I will try autotune.
BTW, I use bullet connector on my ESC. I will check connections, just in case.
Thank!
Ok, I think I definitely have a motor problem.
Today is a calm day so try to make an autonune. Take off, go to pos hold, wait a couple of second and engage autotune. It seems to not start, so, deengage, reposition the copter and try again. Now it start with roll tune. In middle of the test the hexa make 90º on yaw… I think that it is not correct. I reposition the copter make a -90º in yaw and let the tune continue. A couple of second later again a 90º of turn in yaw. Again reposition make a -90º and let continue. A couple of second later the copter make another yaw angle and start to drift. This time I could not follow the yaw turn so reposition was a litle harder and notice some loos of power or something else, I was so nervous trying to get it back that I can’t be sure what I see.
Anyway, attached log file and waiting for some help to determine what is happening.
Thank
That is the usual behaviour of autotune when in position hold.
It detects a breeze and orientates itself so the axis being tuned is not affected.
Can be a bit nerve racking if your not expecting it (and even then).
Also expect it to drift 10 to 15m during the tune.
Did one this morning in gusty conditions, and it drifted off 20m so I brought it back manually.
As the tune progressed it got better at holding position.
Ok, I made several position hold flight and I don’t see motor problems. But I realised that power module report 1V less than real battery voltage. I recalibrate it.
I will try autotune in a wide open area.
Thank!
I make another attempt to autotune. But it takes too long becouse I need to reposition the hexa several times. I pass roll and pitch I think (does it autotune yaw too in 3.5.7?).
After finish it land becouse battery failsafe (13 minute of flight)
Is there a way to extract calculates PID from dataflash?
Thank
Change your autotune preferences to do one axis at a time.
nice one!!! I will do it right now!