hi
My quad rotor was a bit confused with the fixed propellers during the land mission but I am fly with him , I do not know what the problem the sensor. The files attached to the post with numbers 21 are related to the fixed propellers.
after my friend fly with quadrotor and crash it (log 23)
I changed the locusts to the fold model, it crashes every time in the landing mission (log 28 and 29)
what is crash in land mission !? sensor fail or gps or …
log file attached in post.
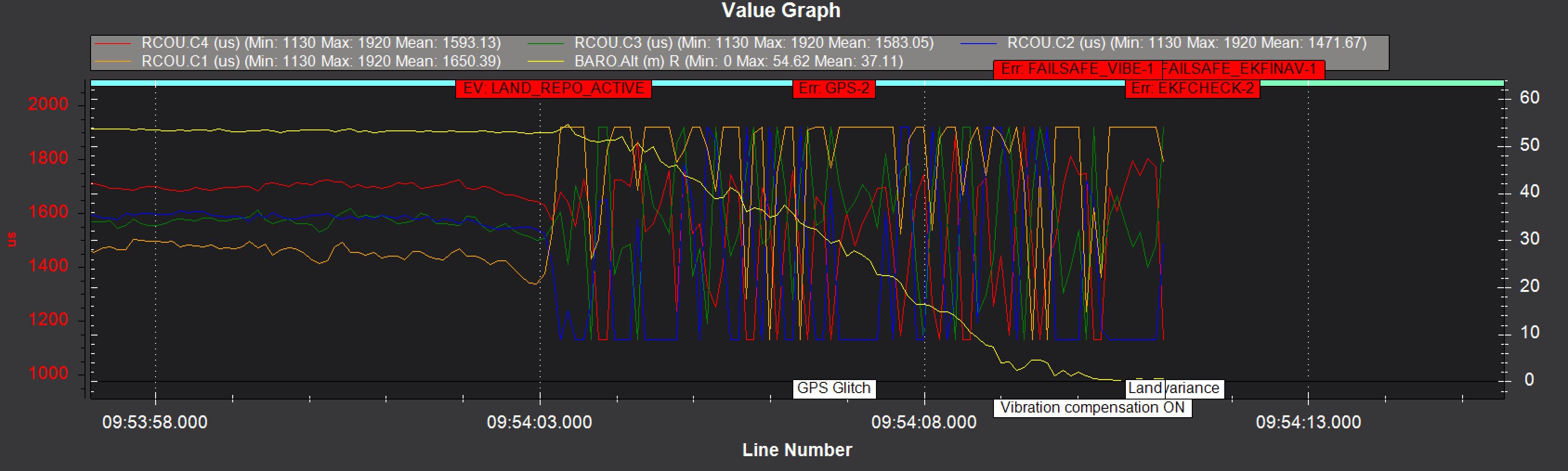
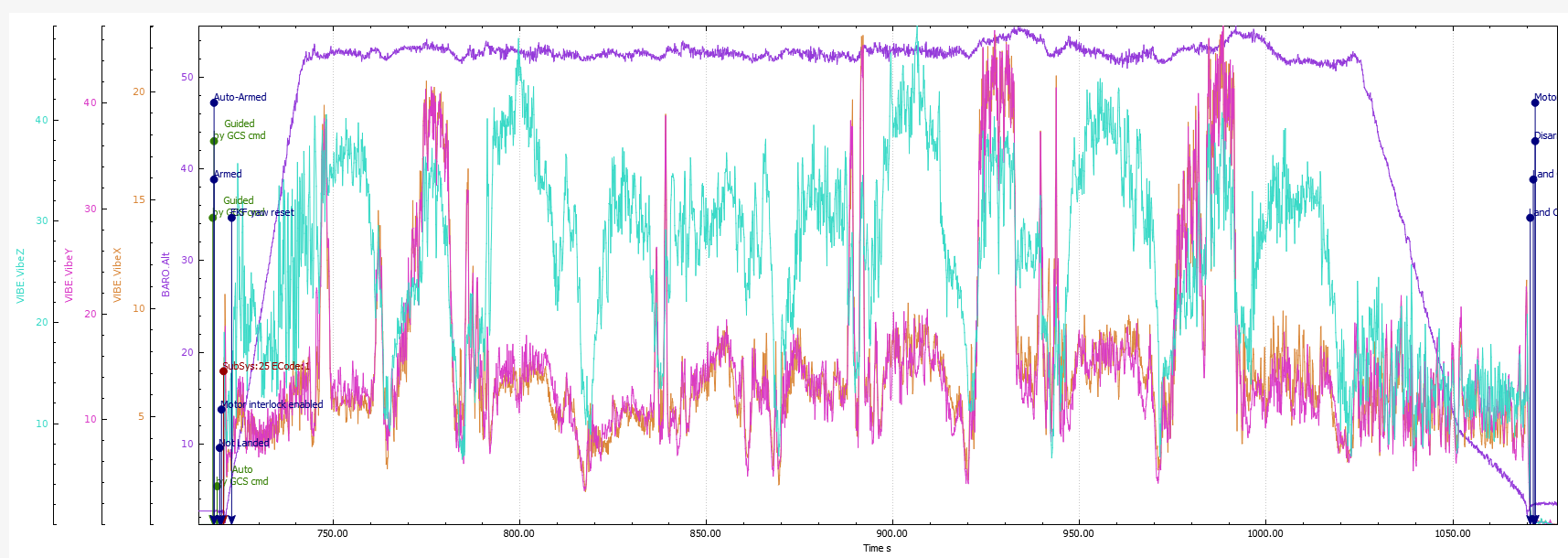
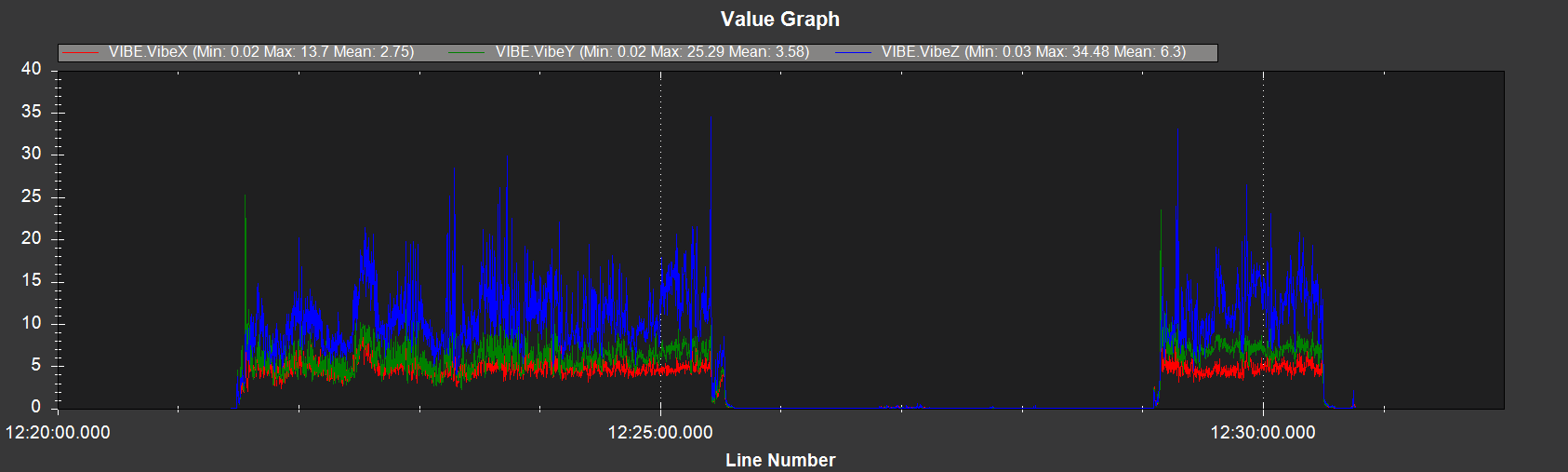
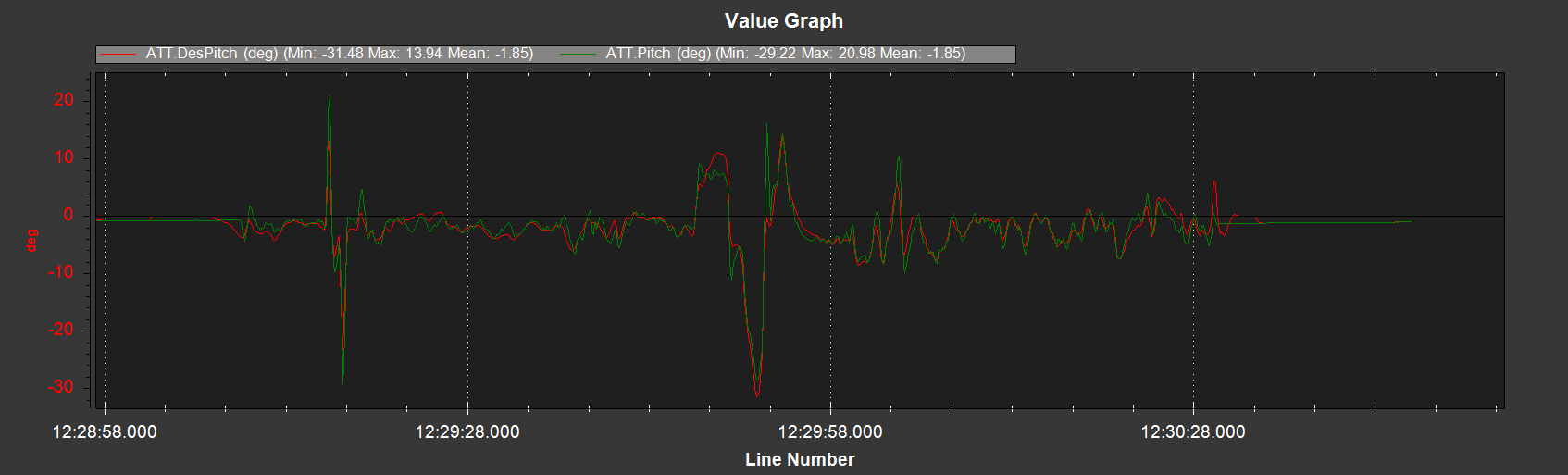
Your vibration levels are high, with clipping, which triggered the Vibration Compensation Failsafe during landing on log 29. But perhaps the problem started with loss of thrust on Motor 1. In any case your vibration levels are higher than desirable.
Then I would suggest you follow the Initial Tuning guidelines rather than simply run this craft on defaults. After connecting to Mission Planner use the Tuning Plug-in by hitting Alt>A. Input the values as prompted and make those changes. If you are not going to use the Dynamic Notch Filter you can leave the INS_GYRO_FILTER at 20Hz.
as i found in your log you are using pixhawk 1, my question is did you puts vibration damper under flight controller ?
as Dave said you have high vibration and it will affect EKF measurement and could make problem like these